



Robotique et informatique, une histoire parallèle

Ayant suivi l’histoire de la micro-informatique depuis ses débuts, j’ai toujours fait un parallèle entre le monde de la robotique humanoïde et celui de l’informatique. Je me suis donc lancé dans une sorte d’exercice de style… N’y voyez pas de quelconques vaticinations, mais envisagez plutôt cette présentation comme une petite parenthèse amusante…
LES GRANDS ANCIENS

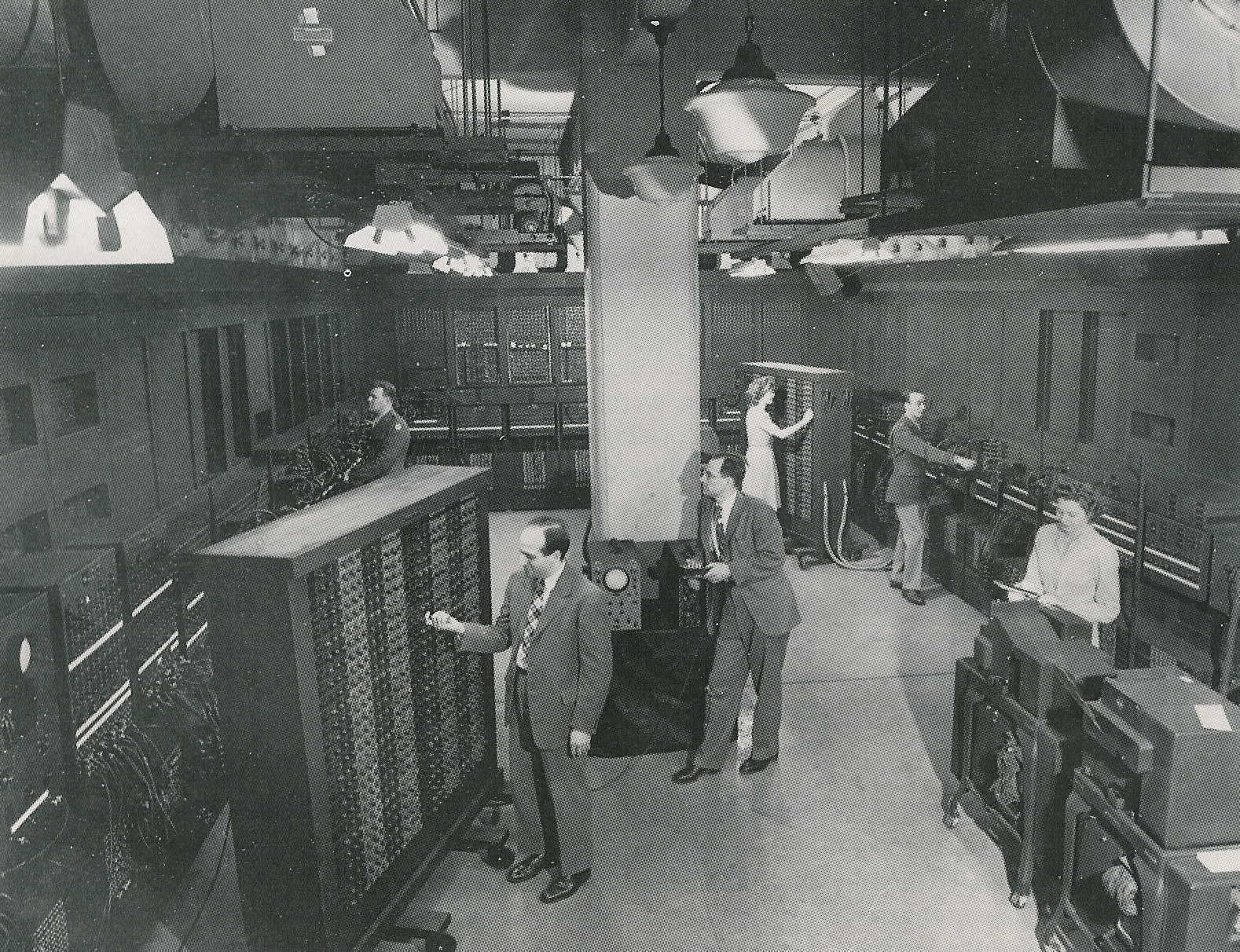
ENIAC (université de Pennsylvanie) — 1946
L’ENIAC (Electronic Numerical Integrator Analyser and Computer) fut le premier ordinateur électronique utilisant le principe de Turing. Programmable et reprogrammable à volonté, il utilisait dix-sept mille quatre cent soixante-huit tubes à vide. Sa taille imposante occupait une surface de cent soixante-sept mètres carrés pour un poids de trente tonnes. Il pouvait gérer cent mille additions simples par seconde, trois cent cinquante-sept multiplications ou seulement trente-huit divisions par seconde. Le terme de bug est né à cette époque parce que des insectes (bugs) entraient dans la machine, se brûlaient les ailes aux tubes et les endommageaient… Son principal problème : pour reprogrammer l’ENIAC, il fallait recâbler toute la machine. Il fut principalement destiné aux calculs des trajectoires de tirs et utilisé jusqu’en 1955.
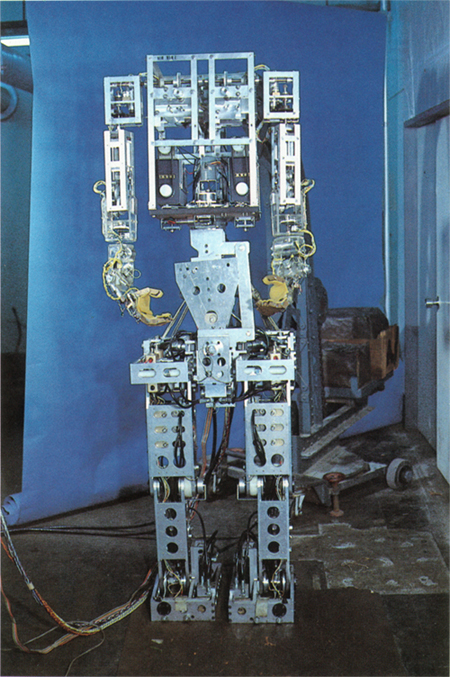
Wabot-1 (université de Waseda) — 1973
Wabot-1 ne fut pas le premier robot de l’histoire, loin de là, mais le premier de type humanoïde à échelle proche. Mis en chantier au Japon en 1973 à l’université de Waseda (Tokyo), il se composait d’un système de contrôle des membres, d’un système de vision et d’un autre de conversation. Et se montrait capable de communiquer avec quelqu’un (en japonais). Pour mesurer les distances et les directions, Wabot-1 utilisait des récepteurs artificiels externes semblables à des oreilles, des yeux et une bouche. Il savait marcher et était en mesure d’attraper et de transporter des objets dans ses mains munies de senseurs tactiles. Un Wabot-2 lui succéda en 1984…
LES PREMIÈRES RÉFÉRENCES
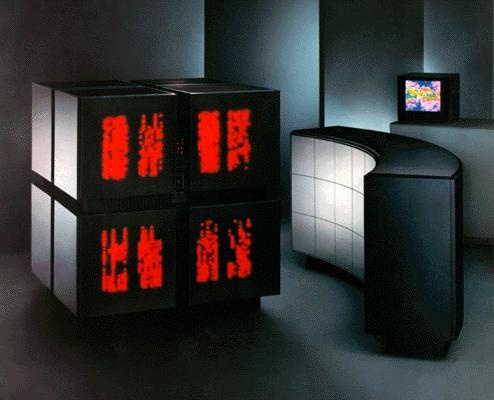
Cray-1 (Cray) — 1976
Le Cray-1 fut qualifié de superordinateur. Architecturé autour d’un processeur 64 bits cadencé à 83 MHz et doté de 8 Mo de mémoire vive, il tournait sous COS (Cray Operating System). Sa forme en arc de cercle permit de réduire la longueur des fils de connexion et donc le temps d’accès aux différentes parties de la machine (mémoire, processeurs…). En son temps, il fut considéré comme révolutionnaire et permit des vitesses de calcul et une puissance jusque-là inimaginables. Aujourd’hui, à titre de comparaison, les smartphones que vous trimballez dans vos poches n’atteignent qu’une puissance légèrement supérieure à celle du Cray-1. Le supercalculateur se présentait sous la forme d’un monstre de cinq tonnes et fut produit en seize exemplaires, vendus chacun près de neuf millions de dollars.

Asimo (Honda) — 2000
Bien que différents prototypes fonctionnels aient été développés par Honda dès 1986, Asimo apparut en 2000 comme un robot révolutionnaire, qui laissait présager ce que le futur nous réservait. Il ressemble en fait à un astronaute de la taille d’un enfant et peut marcher, courir, monter des escaliers, porter un plateau garni et pousser un chariot. Dans un couloir, s’il vous rencontre, il sait même se mettre sur le côté et vous inviter à passer avant de reprendre son chemin. Son aspect et sa démarche, réalistes, le rendent éminemment sympathique. (Asimo est toujours, actuellement, un robot de recherche et ne se trouve pas encore dans le commerce. À terme, il devrait venir en aide aux personnes handicapées, âgées ou malades…)

LES OUTSIDERS DE GRANDE PUISSANCE
Cyber 205 (Control Data Corporation) — 1981
Construit pour procéder à des calculs scientifiques (étude des fluides, météorologie ou probabilités), les ordinateurs CDC ont vu naître leur fleuron en 1974. Comme le Cray-1, le CDC STAR Cyber 205 est un supercalculateur 64 bits. Cray et CDC se sont livrés à une concurrence effrénée — à qui produirait la machine la plus puissante —, mais CDC resta toujours le challenger… Tous deux programmables en langage Fortran, les deux ordinateurs avaient été étudiés de fond en comble selon différents algorithmes (benchmarks). À l’époque, la communauté informatique eut les yeux de Chimène pour leurs résultats.

Partner (Toyota) — 2005
Depuis quelques années, les constructeurs automobiles sentent le vent de l’industrie s’infléchir vers la robotique de services. Honda fut le premier à faire le pas avec son robot Asimo. Toyota a suivi et a présenté son premier modèle de Partner en 2005. (Ledit Partner interpréta de la musique lors de l’Exposition universelle d’Aichi.) Il est actuellement décliné en plusieurs modèles — dont un robot humanoïde capable, comme Asimo, de marcher et de courir. Le Japon réfléchit à la possibilité d’envoyer des robots Partner sur la Lune d’ici une dizaine d’années afin d’y établir une base autonome et automatique…

QUAND LES PAYS CONCURRENTS ÉMERGENT…
M10 (Kartsev) — 1976
Durant la guerre froide, les Russes s’efforcèrent de rattraper leur retard technologique sur les Américains. Or, leurs capacités étaient moindres et leurs bases plus étroites. Mikhail Kartsev mit alors au point le M10, un supercalculateur capable de rivaliser avec les puissances de calcul américaines. La machine était équipée de plusieurs processeurs qui, additionnés, avaient un débit de 20 à 30 MIPS (Millions d’Instructions Par Seconde). L’ordinateur était dédié à des activités militaires et resta très longtemps secret. Il avait été conçu pour détecter les lancements de missiles américains par le biais de l’analyse des données fournies par les satellites et se révélait également capable de calculer la trajectoire que les missiles allaient adopter dans l’espace grâce aux données recueillies par les radars.
Hubo (KAIST) — 2005
La Corée fut province japonaise de 1910 à 1945. Depuis la libération, la Corée du Sud et le Japon, désormais dans le « même » camp, ont transféré leur animosité politique vers la compétition économique. Et quand le Japon décida de se lancer dans la robotique, la Corée du Sud suivit le mouvement… Alors que le projet japonais Asimo a coûté la bagatelle de trois cents millions de dollars, Hubo (ou KHR-3) a seulement bénéficié d’un budget d’un million de dollars. Ses performances apparaissent bien moindres — mais il semble que Hubo comble petit à petit son retard. Maintenant, il se révèle capable de marcher et de courir. (Et une de ses versions, destinée à séduire les médias, arbore carrément la tête du génial Albert Einstein.)

À LA RECHERCHE DE LA BEAUTÉ
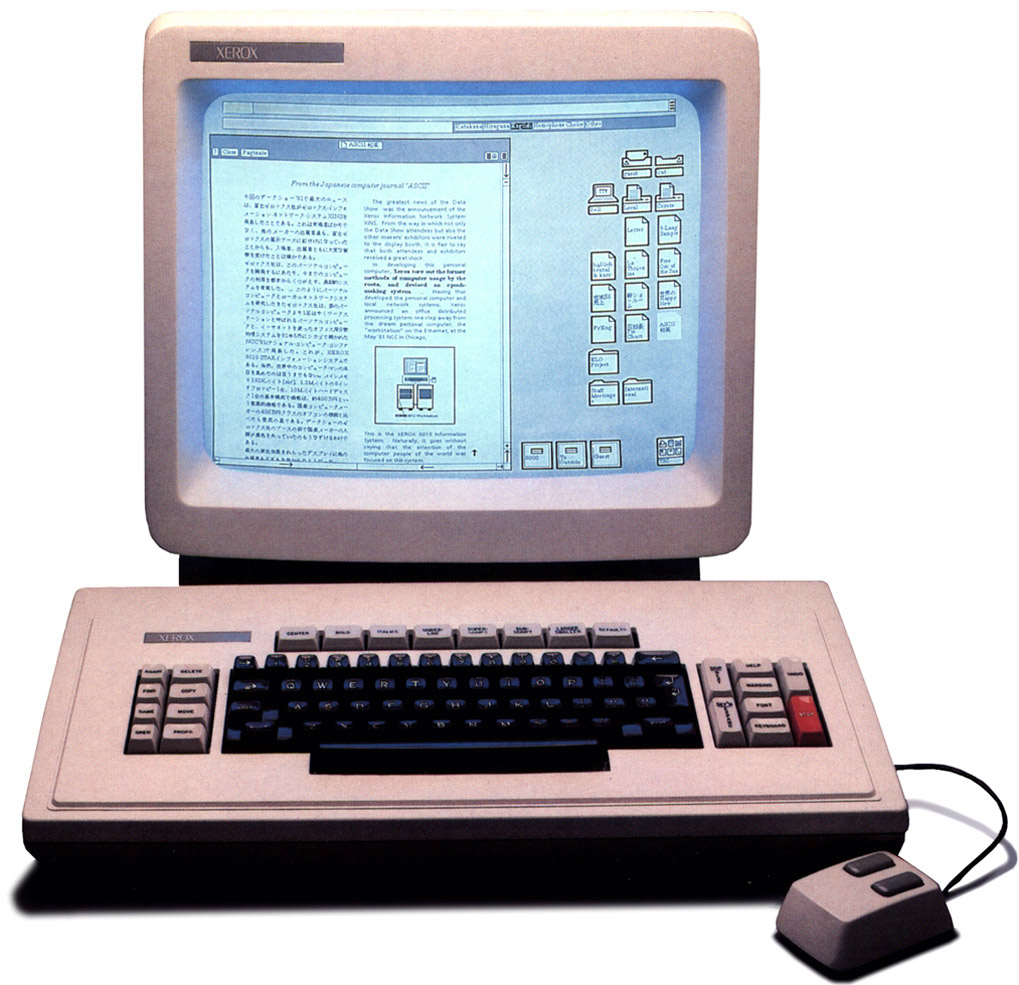
Xerox Star (Xerox PARC) — 1981
Cet ordinateur constitua une révolution. Le Xerox Star fut en effet l’un des premiers ordinateurs à utiliser le principe d’une interface graphique représentant des fenêtres, des icônes et des dossiers. Afin de faciliter son utilisation, on lui adjoignit une souris — une véritable première là aussi ! Le Xerox 8010 Information System pouvait déjà se connecter à un réseau Ethernet et bénéficier des premiers services de messagerie électronique. Encore plus fort, ce qui apparaissait à l’écran était exactement ce qui sortait en version imprimée : le WYSIWYG (What You See Is What You Get) était né… Les laboratoires qui avaient élaboré le Xerox furent visités par des membres du personnel d’Apple, qui s’en inspirèrent pour développer le Lisa, puis le célèbre Macintosh. (De plus, l’interface graphique et la souris étaient non seulement fonctionnels, mais fort esthétiques !)
Actroid (université d’Osaka) — 2003
Les robots à l’apparence humaine Actroid sont eux aussi révolutionnaires. Pas encore aussi fonctionnels que des robots comme Asimo ou Partner, ils l’emportent sur le plan esthétique. Ils ressemblent en effet à des jeunes filles (leur apparence s’inspire des caractéristiques moyennes de cette tranche d’âge de la population japonaise) et seuls leurs mouvements encore un peu brouillons permettent de les identifier si l’on se rapproche un peu trop… Les Actroid peuvent imiter des fonctions humaines (comme parler et respirer) ; quant aux modèles Repliee, ce sont des robots interactifs dotés de la capacité de reconnaître et de traiter la parole — puis de répondre à un interlocuteur.

TOUT COMMENÇA AVEC LE JEU
Odyssey (Magnavox) — 1972
Ralph Baer eut un jour une idée géniale : se servir des apports de l’informatique débutante pour créer des jeux amusants. Il prit comme cible un écran de télévision et lui ajouta un boîtier bourré de puces électroniques, qu’il équipa de deux appendices destinés à deux joueurs différents. L’Odyssey, la première console de jeux vidéo était née !… Les jeux, bien sûr, étaient de conception ultrasimpliste et toujours basés sur deux carrés lumineux représentant les deux joueurs : ces derniers pouvaient les déplacer sur l’écran avec leur manette (un troisième carré lumineux, plus petit, étant dirigé par la console). Cependant, les graphismes pouvaient être améliorés par des papiers transparents (de couleur ou illustrés de décors liés au jeu) que l’on collait sur l’écran. Et si l’on voulait changer de jeu, il fallait enficher une autre cartouche dans la console. L’informatique investit donc les foyers par l’intermédiaire du ludiciel !

Robosapien (WowWee) — 2004
Mark Tilden a eu lui aussi une idée géniale, celle de procurer aux foyers des robots ludiques pas chers pour amuser petits et grands… Le Robosapien ne comporte aucun servomoteur et ne possède pas d’Intelligence artificielle, même limitée. Il est simplement contrôlé par une télécommande ou bien exécute des chorégraphies préenregistrées. Ne s’exprimant que par grognements, il est doté de senseurs qui détectent des objets lorsqu’il se déplace. Par une liaison infrarouge avec la télécommande, le Robosapien peut enfin être programmé à distance, à partir d’un ordinateur qui lui envoie les ordres. (Ce jouet a fait un tabac et toute une gamme de robots de la même marque lui ont succédé.)

BRUTS DE DÉCOFFRAGE
Altair 8800 (MITS) — 1975
Conçu comme un micro-ordinateur personnel (il fut même le premier) l’Altair 8800 n’y ressemblait pourtant vraiment pas. La machine consistait en un gros boîtier dans lequel on entrait les informations en manipulant des interrupteurs. En guise d’écran, on avait droit à des combinaisons d’affichage de LEDs. Pourtant, vendu aux particuliers, il ne recueillit qu’un succès mitigé : quelques milliers de personnes seulement se procurèrent la machine afin de goûter à l’outil informatique. (Bill Gates et Paul Allen, encore étudiants, y écrivirent leur premier logiciel — un langage de programmation, l’Altair Basic. Et la société Microsoft fut créée pour gérer cette activité…)

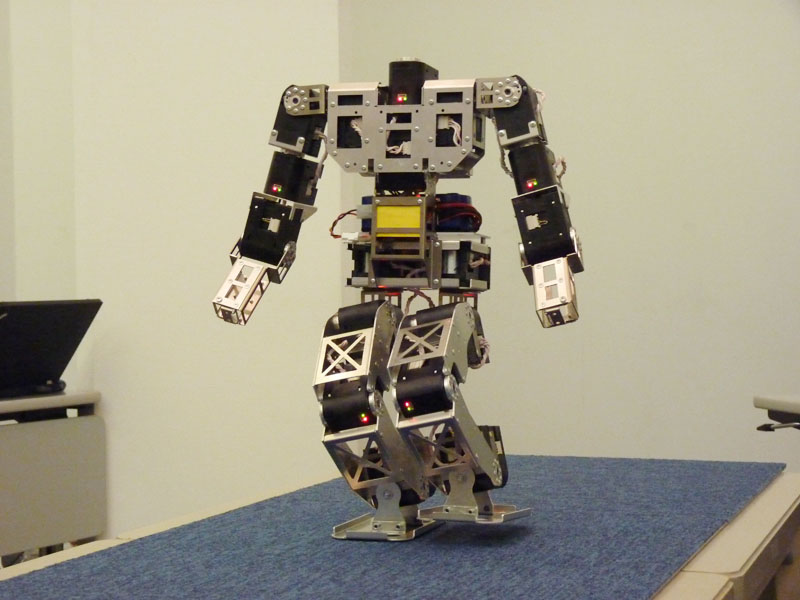
HRP-2m Next (AIST) — 2009
Comme l’Altair à son époque, ce robot humanoïde est du genre nu et sans paillettes. Visuellement, cela ressemble à des servomoteurs reliés habitant une forme vaguement humaine. Haut de soixante centimètres (pour cinq kilos huit cents grammes) sans sa batterie, le robot se déplace pourtant avec une démarche tout à fait correcte et sait se tenir en équilibre sur une jambe. (Prix : moins de huit mille dollars.)
LES PREMIERS VRAIMENT DÉDiÉS AU GRAND PUBLIC
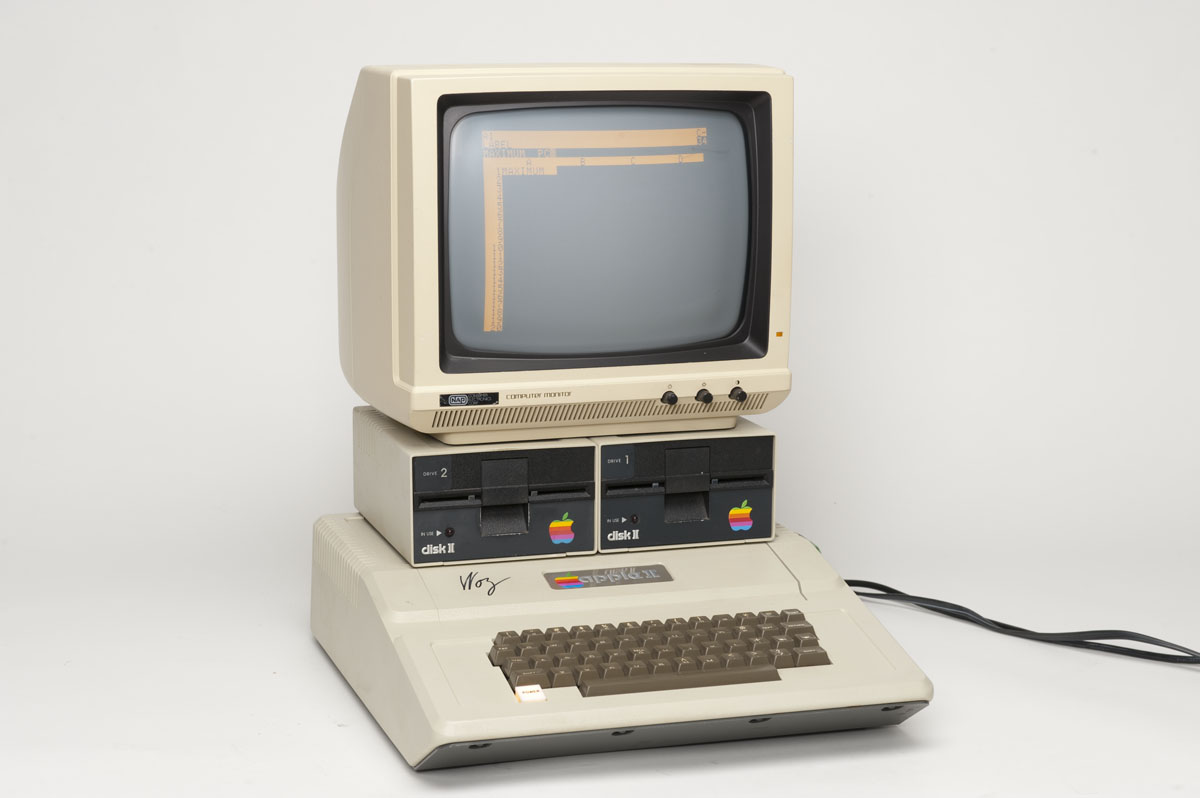
Apple // (Apple) — 1977
À la fin des années 1970, une certaine frénésie commençait à se faire sentir dans nombre de foyers, fascinés par les ordinateurs. On pouvait en acheter pour la maison, mais ils ne servaient à rien, sinon à figurer de jolies guirlandes de Noël — avec leurs diodes colorées qui clignotaient pour donner le résultat d’opérations simples. L’interface homme-machine en était alors à ses balbutiements… Soudain, en 1976, Steve Jobs et Steve Wozniak présentèrent l’Apple I, le premier vrai micro-ordinateur moderne possédant un clavier de type machine à écrire et un écran pouvant afficher texte et graphisme. Mais la seconde version — l’Apple 2 (ou Apple //, ou même Apple][) —fut vraiment le vrai premier micro-ordinateur destiné à envahir les foyers passionnés par les nouvelles technologies.
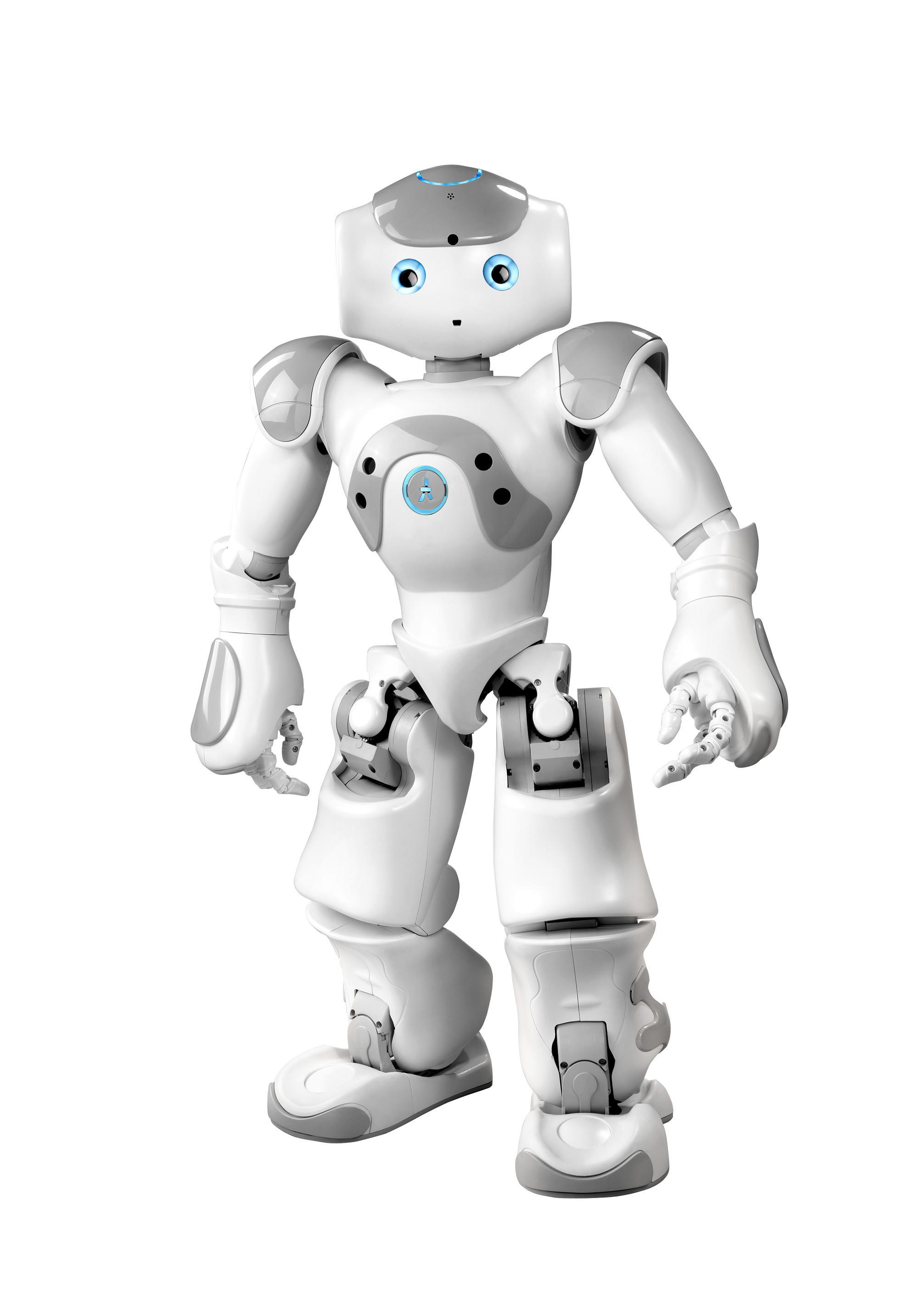
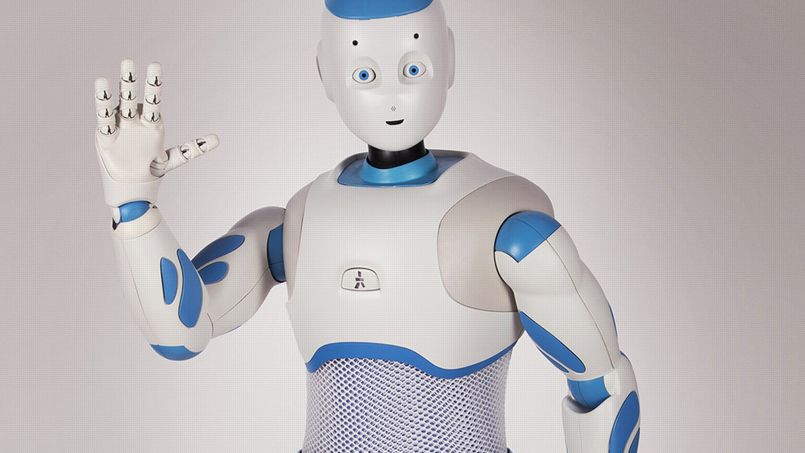
Nao (Aldebaran Robotics) — 2006
Inutile de présenter à nouveau Nao, le premier robot humanoïde destiné au grand public. Certes, la version pour M. et Mme Tout-le-monde ne se trouve pas encore dans les magasins, mais devrait arriver dans les bacs d’ici quelques mois. Tout comme l’Apple 2, Nao ne résoudra pas tous nos problèmes mais nous montrera ce que l’avenir nous réserve ! Pas encore tout à fait fonctionnel dans ses capacités de services, il sera davantage dévolu à ceux qui veulent tester à tout prix ce que d’autres ne vivront en vrai que dans dix ans — avec des robots encore plus performants. Exactement à l’image d’Apple 2 et de ses logiciels tableurs, comme VisiCalc, qui laissaient présager ce que le logiciel Excel donnerait sur les premiers Mac quelques années plus tard…
LA MINIATURISATION ET SES DÉBUTS
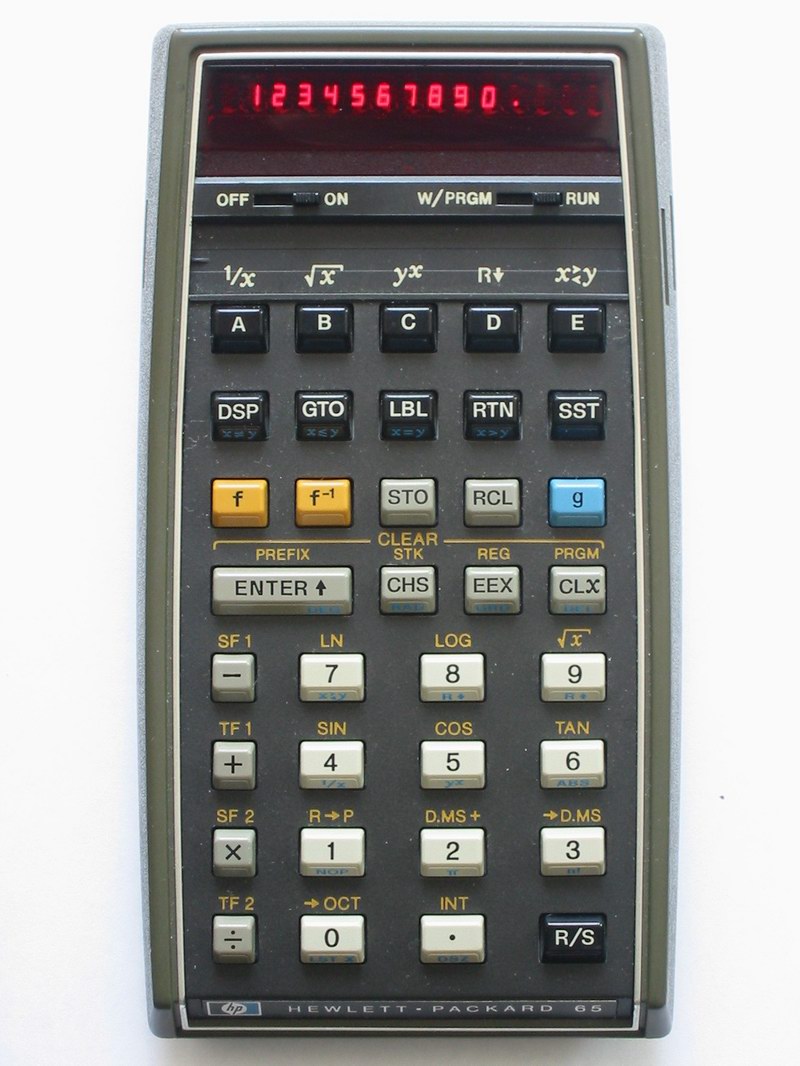
HP-65 (Hewlett Packard) — 1974
Alors que les premiers micro-ordinateurs n’étaient pas encore vraiment arrivés, Hewlett Packard sortit le premier ordinateur portable autonome de l’histoire… Maintenant, on appellerait plutôt ça une calculatrice programmable (dont il adoptait en grande partie le design). Le HP-65 utilisait des cartes magnétiques comme support de sauvegarde, possédait neuf registres de mémoire et pouvait retenir cent pas de programmation. (Petit détail que les spécialistes apprécieront : il utilisait la notation polonaise inversée en se servant du principe des piles de données.) Et en 1975, la machine prit part au rendez-vous spatial entre Appolo et Soyouz.
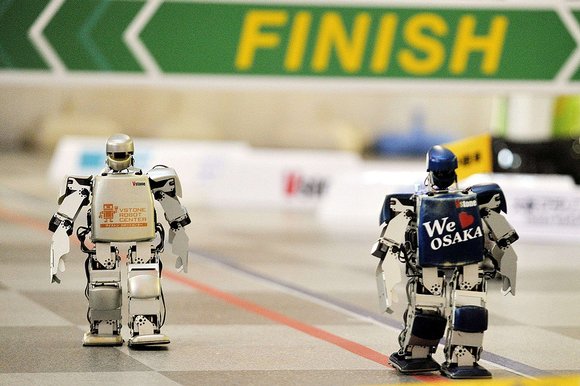
Robovie-PC (Vstone) — 2009
Pas forcément la peine de créer un robot humanoïde géant pour impressionner tout le monde ! Vstone nous l’a montré avec son Robovie-PC… Avec ses trente-neuf centimètres et ses deux kilos deux cents grammes, il se montre déjà très athlétique et possède quelques atouts qui ne sont normalement donnés qu’à des robots plus gros. Programmable depuis un ordinateur, le Robovie-PC est équipé d’un Atom Z530 à 1,6 GHz. Sa caméra 1,3 Mpx placée au niveau de la tête lui permet de voir et de récupérer un maximum d’informations sur son environnement. Et contrairement au HP-65 (qui coûtait le prix d’une petite voiture à son époque), il reste relativement accessible en regard de ses congénères.
DE GROSSES MACHINES AVEC UNE APPARENCE INDUSTRIELLE
PET (Commodore) — 1977
Ressemblant plus à une caisse enregistreuse en usage dans les grands magasins des années 1980 qu’à un ordinateur, le Commodore PET 2001 n’en fut pas moins un des héros du début de la micro-informatique personnelle. Il intégrait tout ce qu’une machine de ce type devait offrir à son utilisateur : un clavier, un écran et une unité centrale… Il faut savoir qu’en ces temps lointains les ordinateurs avaient seulement pour écran une ligne (de type calculatrice) et pour clavier quelques touches collées sur une carte informatique… Avec ses 1 MHz et ses 4 Ko de RAM, le PET se présentait comme le grand rival de l’Apple 2.

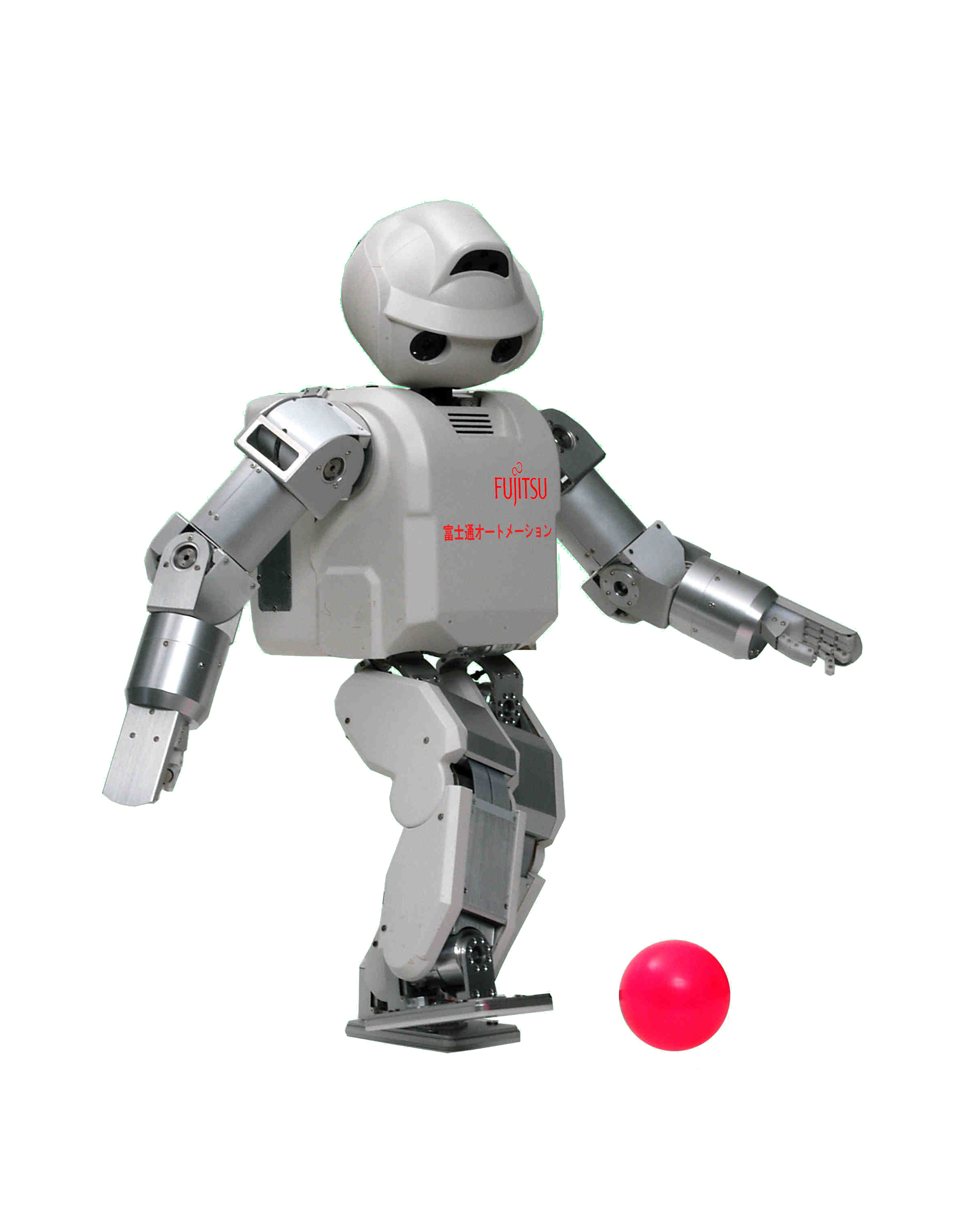
HOAP-3 (Fujitsu) — 2005
Notre petit Nao national compte un concurrent, le robot HOAP-3 de Fujitsu Automation. Certes, il n’a pas de vocation grand public pour le moment, mais a déjà montré au monde entier ses capacités à travers de multiples vidéos visibles sur le Net : marche, cuisine, dessin, équilibre… Avec ses soixante centimètres pour un peu moins de neuf kilos, HOAP-3 propose un design très épuré. Utilisant un Pentium M à 1,1 GHz sous RT-Linux, il porte son fardeau dans son dos — comme le robot Asimo et son sac à dos d’astronaute…
DE FABULEUSES MACHINES TROP TÔT DISPARUES
TI-99/4 (Texas Instruments) — 1979
Texas Instruments était un fabricant de processeurs, de trucs genre La Dictée magique et de calculatrices quand le marché de la micro-informatique commença à se développer. TI décida alors d’attaquer très fort ! In illo tempore, les micro-ordinateurs étaient architecturés sur des processeurs 8 bits (aujourd’hui, nous sommes en 64 bits) et l’entreprise sortit un premier micro-ordinateur TI-99/4a basé sur un processeur 16 bits (que la société fabriquait elle-même), le TMS9900. Le TI-99/4 eut tout de suite la réputation d’une bête de course car il devançait technologiquement tout ce qui existait dans les foyers. Mais malheureusement, Texas Instruments se retira du marché et abandonna sa gamme de micro-ordinateurs… Les utilisateurs ressentent encore une amère déception à l’évocation de cette incompréhensible interruption…

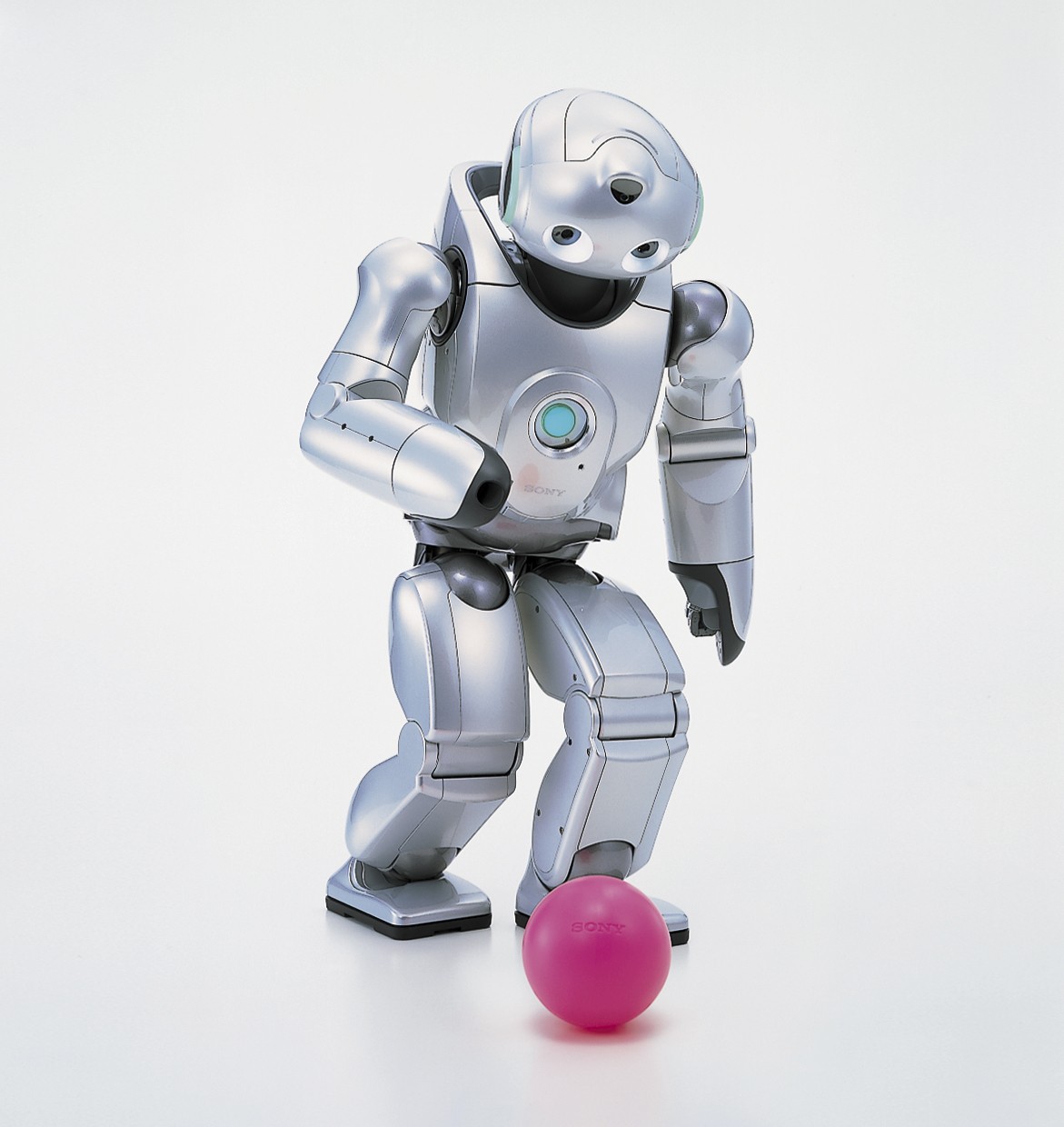
QRIO (Sony) — 2003
Après avoir démontré son savoir-faire en matière de robotique avec ses robots chiens Aibo, Sony avait développé un petit engin humanoïde de cinquante-huit centimètres fort prometteur, le QRIO : ses mouvements étaient très harmonieux, fluides et il impressionnait par ses danses… Hélas, tout comme Texas Instruments autrefois, Sony décida d’arrêter son activité robotique et enterra Aibo et QRIO, alors que ce dernier n’avait pas eu vraiment le temps de sortir des laboratoires. Désormais, c’est Toyota qui utilise en partie, pour ses robots Partner, les technologies élaborées pour le QRIO.
EN KIT OU PRÊTS À L’EMPLOI ?
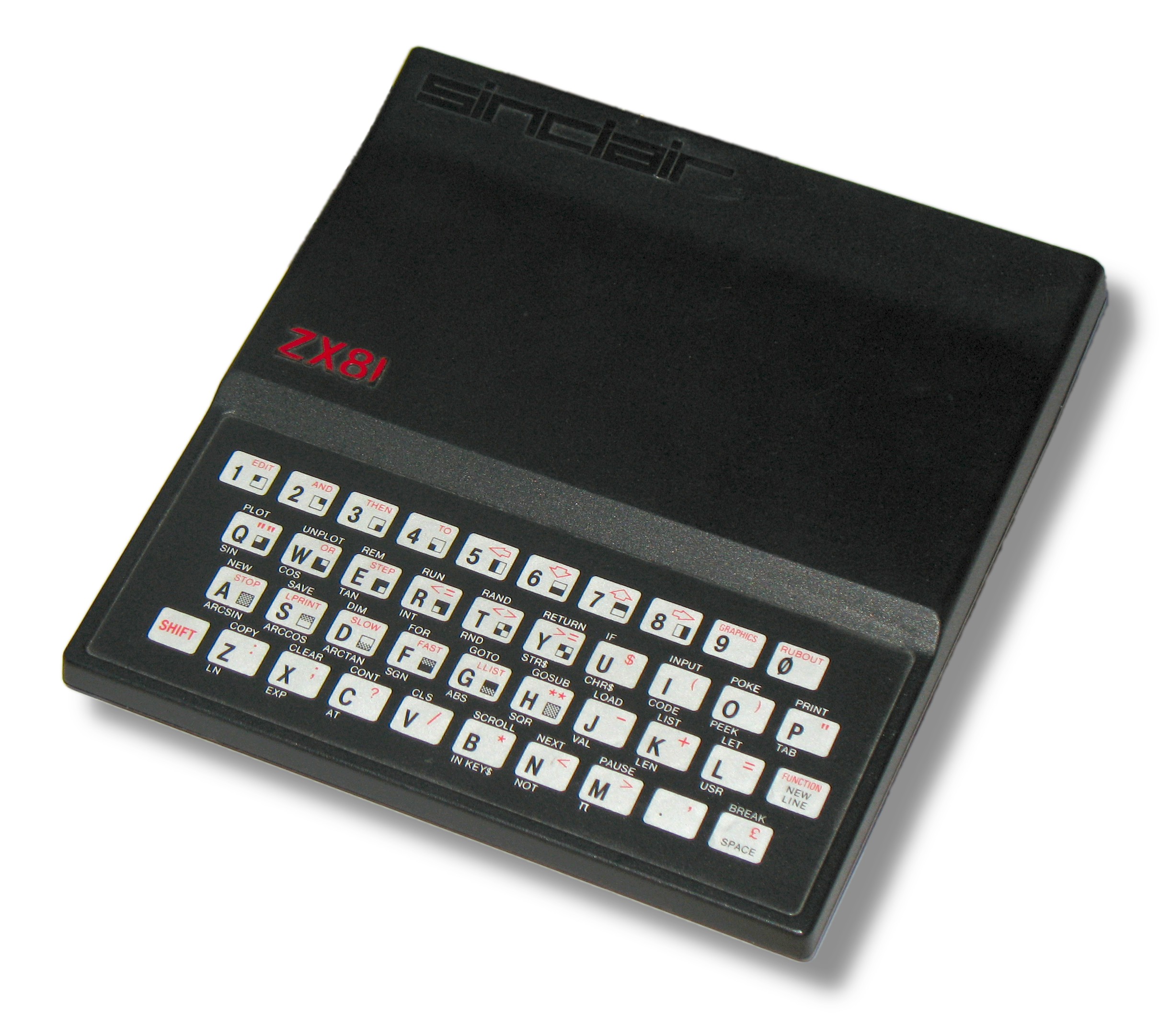
ZX81 (Sinclair) — 1981
Sir Clive Sinclair conçut quelques très grandes idées pour son micro-ordinateur ZX81… Tout d’abord, aucune débauche de technologie, le strict minimum de puissance dans un boîtier minimaliste doté d’un clavier plat… Tout avait été fait à l’économie afin de réduire la facture de ceux qui voulaient s’équiper d’un ordinateur à la maison. Le ZX81 souffrait de grandes limitations et se révélait difficile à utiliser — mais apparaissait suffisant pour les aficionados de l’époque. Afin de réduire encore plus le prix, on pouvait acheter l’ordinateur en pièces détachées — comme une maquette ! Il passait ainsi de neuf cent quatre-vingt-dix francs (cent cinquante euros) en version complète à six cent quatre-vingt-dix (cent cinq euros) en kit. Des sommes qui nous laissent rêveurs…
DARwin-Op (Robotis) — 2010
DARwin-Op se présente peu ou prou comme un robot d’initiation très évolué (comme un Nao). Totalement open source, il peut être programmé et reprogrammé par n’importe qui. Encore plus fort, du fait même que le robot est open source, vous pouvez le monter vous-même. Les plans de DARwin-Op se trouvent sur Internet et les logiciels y sont également téléchargeables. Rien ne vous empêche donc de télécharger le tout et de construire le robot dans votre garage… (Si le bricolage de précision vous rebute, vous pouvez très bien en acheter un complet pour huit mille dollars — c’est vous qui voyez !)

UN PAS VERS LA STANDARDISATION
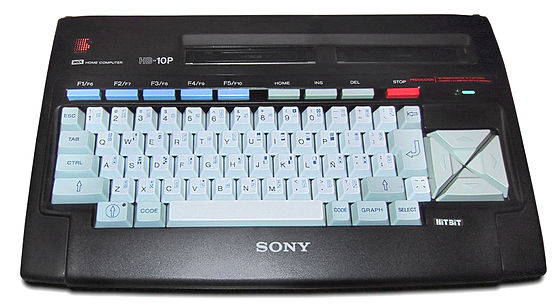
MSX (Microsoft) — 1983
Dés le début des années 1980, Microsoft a tenté de généraliser un standard. Bonne ou mauvaise idée ? Cela fait toujours débat… Pour certains, le standard détruit toute idée de révolution technologique et entrave l’esprit créatif. Pour d’autres, il permet enfin l’échange de données et de programmes entre les supports — mais cela épargne aux constructeurs de réinventer la roue ! En tout cas, Microsoft s’est lancé une première fois avec le standard MSX — des ordinateurs tous architecturés autour d’un processeur 8 bits, le Zilog Z80, et d’un langage de programmation intégré, le Microsoft Basic… Ce standard prit son envol au Japon, où de nombreux constructeurs avaient sorti leur ordinateur compatible (Canon, Sanyo, Sony, Yamaha, etc.) mais se répandit assez peu dans le reste du monde. Les dernières machines au standard MSX Turbo R sortirent en 1990. (C’est en fait avec Windows 95 que Microsoft créa un vrai standard informatique utilisé dans le monde entier, en réduisant à néant les autres formats de l’époque — Atari ST, Amiga Classic, etc.)
ROS (Willow Garage) — 2007
Willow Garage a développé un système d’exploitation pour son robot PR2, le ROS (Robot Operating System), qu’elle propose comme standard au reste du monde robotique… Son développement open source va certainement aider ROS à devenir le système d’exploitation de robots comme Nao, Husky A200, QBo, Robotino, etc. Il peut s’interfacer et se programmer à l’aide du langage de programmation français open source URBI et utilise la bibliothèque de traitement d’image OpenCV pour gérer la vision du robot. Aujourd’hui, de nombreux constructeurs s’éparpillent pas mal dans la création de leurs robots. Vont-ils tenter chacun leur tour de créer le standard du futur ou bien se raccrocher à ROS — qui est bien parti pour devenir un des leaders de ce nouvel eldorado technologique ?…

ENFIN DES OUTILS RÉELLEMENT UTILISABLES
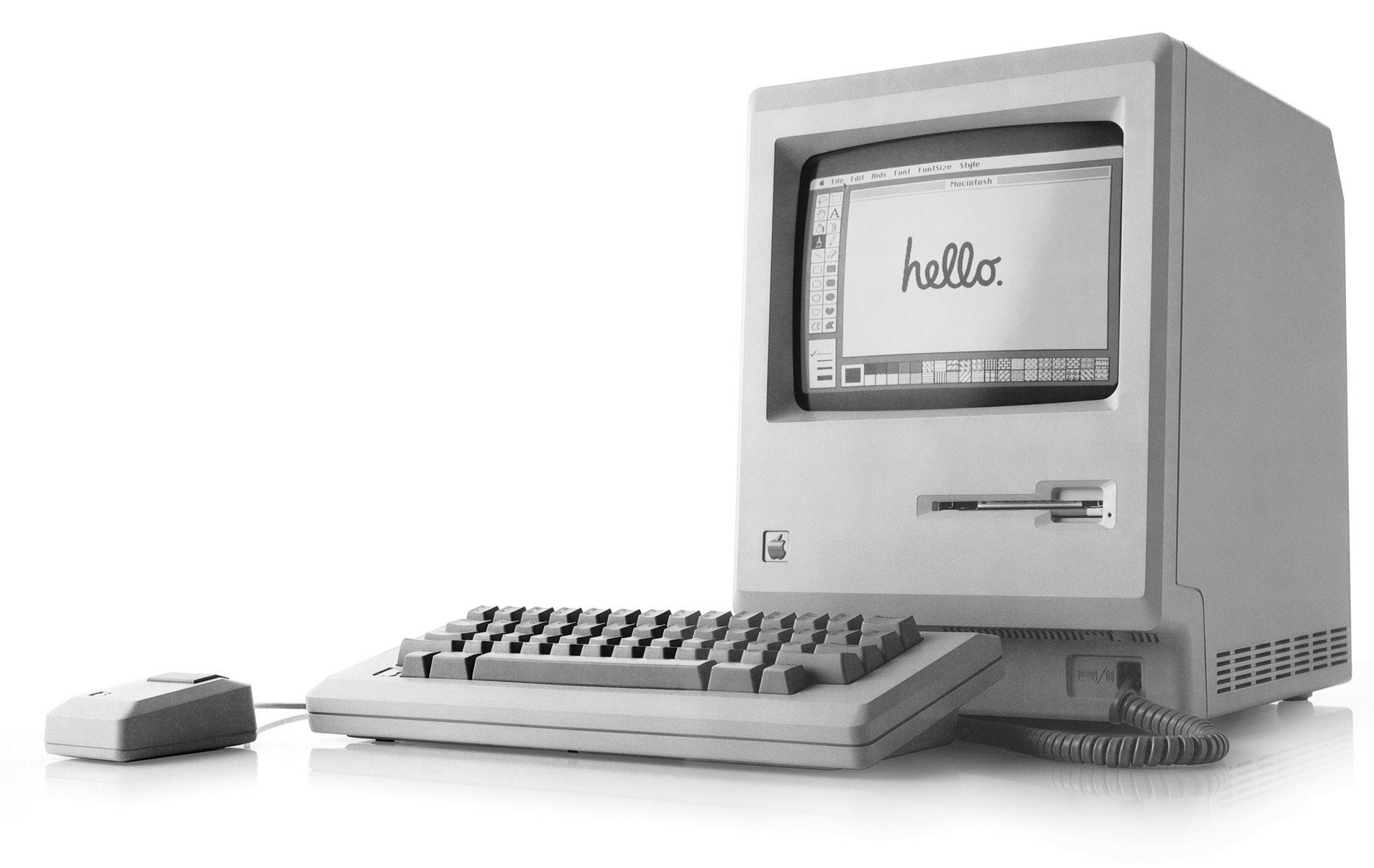
Macintosh (Apple) — 1984
En adaptant les bases des machines de Xerox dans un ordinateur destiné au grand public, Apple signa l’arrivée du Mac. Enfin, une souris pouvait remplacer avantageusement le clavier dans de nombreuses manipulations ! Et l’interface devenait claire et facile à utiliser… De plus, le boîtier monobloc du premier Mac — le premier micro-ordinateur vraiment fait pour tout le monde — ne prenait pas trop de place sur le bureau. D’autres reprirent ces concepts en les améliorant (comme l’Atari ST — surnommé le Jackintosh — ou l’Amiga). Le PC, pourtant né la même année que le Mac, n’atteignit la même facilité d’utilisation qu’en 1995, avec la quatrième version de Windows…
ROMEO (Aldebaran Robotics) — 2015 ?
Actuellement en cours de développement, ROMEO pourrait devenir le premier robot humanoïde destiné au grand public capable de rendre de nombreux services dans un domicile. Sur les traces de l’Asimo de Honda, il devrait coûter largement moins cher et pourra équiper les foyers qui en manifesteront le besoin. Certes, dans un premier temps, le robot sera très certainement réservé aux écoles et aux centres de recherche, mais il devrait ensuite et sans trop tarder aider les personnes à mobilité réduite et les personnes âgées à vivre chez elles de façon plus autonome…
Le lecteur peut se plonger dans l’Histoire, non seulement pour y découvrir le passé, mais aussi pour mieux comprendre le présent et — pourquoi pas — anticiper l’avenir. L’Histoire est un éternel recommencement, paraît-il… Pour ma part, j’attends avec une grande impatience le robot qui provoquera une révolution que l’on pourra comparer à celle qui bouleversa le monde de l’informatique lorsque sortit l’ordinateur Commodore Amiga, en 1985 !
Frédéric Boisdron
Article tiré de Planète Robots n°11 de septembre 2011
![[Vintage] Retour sur la saga d’AIBO, le robot chien (Partie 3/3)](https://www.planeterobots.com/media/2016/06/09.jpg)
![[Vintage] Retour sur la saga d’AIBO, le robot chien (Partie 2/3)](https://www.planeterobots.com/media/2016/06/04.png)
![[Vintage] Retour sur la saga d’AIBO, le robot chien (Partie 1/3)](https://www.planeterobots.com/media/2016/06/06.png)

Merci pour votre publication, et bravo pour le site !!!