



Minitaur a du ressort
On l’avait vu escalader des grillages, ouvrir une porte en sautant sur la poignée avec la souplesse d’un gros chat. Ensuite on l’a vu se tortiller comme un petit chien pressé de retrouver son maître devant la porte entrouverte, pour ensuite l’ouvrir en la poussant.

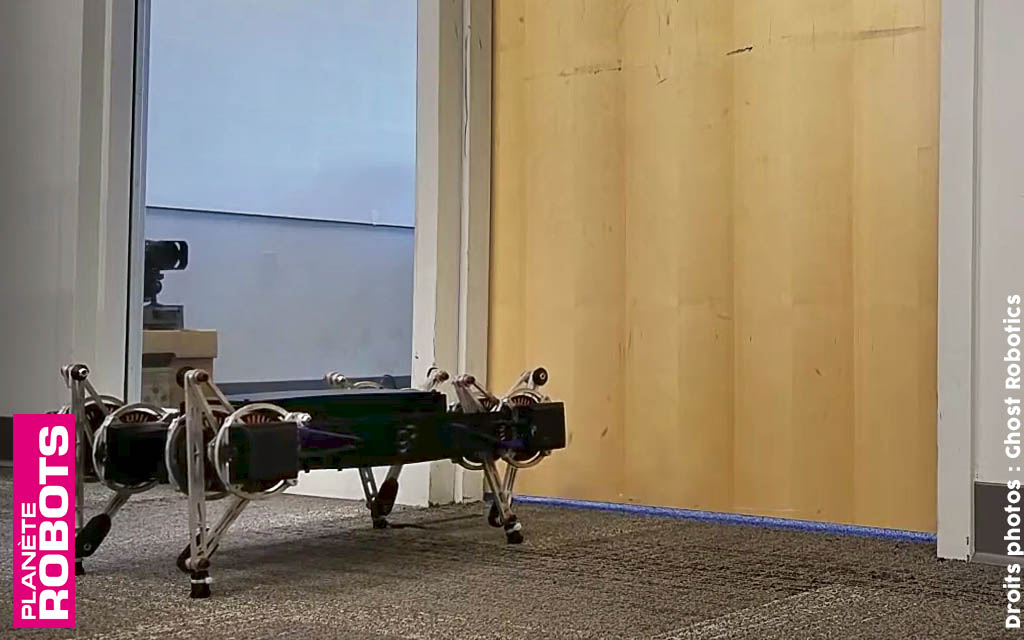
Ghost Minitaur revient avec de nouvelles aptitudes toujours plus impressionnantes, comme vous allez le voir en vidéo ci-dessous, vous allez le voir marcher dans la neige et sur de la glace, s’accroupir pour passer ensuite sous une voiture…
Vendue comme une plateforme idéale de développement de véhicule terrestre sans pilote (Unmanned Ground Vehicle ou UGV), le Minitaur est vendu 11 500 dollars.  Ghost Robotics prévoit de proposer des applications commerciales de leur robot quadrupède. Techniquement Minitaur est équipé de moteurs électriques brushless connectés très puissants, les 4 moteurs transmettent en temps réel et à haut débit le ressenti des irrégularités du sol aux capteurs, le temps de réaction de l’électronique embarquée est inférieur à 100 millisecondes, et corrige en temps réel le comportement des pattes.
Ghost Robotics prévoit de proposer des applications commerciales de leur robot quadrupède. Techniquement Minitaur est équipé de moteurs électriques brushless connectés très puissants, les 4 moteurs transmettent en temps réel et à haut débit le ressenti des irrégularités du sol aux capteurs, le temps de réaction de l’électronique embarquée est inférieur à 100 millisecondes, et corrige en temps réel le comportement des pattes.
La programmation des moteurs et de leurs régulateurs a été poussée au point qu’elle permet de donner à ces moteurs brushless un comportement élastique et des effets ressorts. Les moteurs réagissent au retour de force, et l’électronique et leur programmation fait le reste pour que Minitaur adapte un déplacement, le plus sûr et le plus efficace possible. Ce système très perfectionné des moteurs est en cours de brevetage.
Ce principe d’équiper le robot avec des moteurs très puissants participe à la robustesse de la machine, car en effet c’est l’électronique qui fait le boulot, pas besoin de boîte de vitesse mécanique. Cette dernière rendrait fragile le robot dans le cas où il serait sujet à des chocs, et surtout une boîte de vitesse créerait un intermédiaire qui parasiterait et filtrerait les ressentis des surfaces.
Nous avions déjà évoqué cette piste avec le robot marcheur Cassie. L’orientation de la marche des robots vers un principe de rebonds très économes en énergie semble une piste de plus en plus suivie par les labos de robotique.
À suivre.





