
À moitié humanoïde, Aquanaut travaille dans le fond des océans

L’Aquanaut utilise une méthode de contrôle par séquences qui lui permet dans les eaux profondes de pouvoir être contrôlé précisément sans avoir à transmettre une masse d’informations qui le contrôle trop importante. Dans l’objectif de réduire la quantité d’informations et le risque de latence dans les ordres donnés, le robot reçoit un ordre et effectue la séquence de mouvements adaptés à l’équipement se trouvant sous l’eau. Le robot qui est équipé de caméras et d’un sonar, synthétise son environnement qui est retransmis à l’opérateur. Une fois l’environnement du robot retransmis, analysé et compris par l’opérateur humain, la demande d’action est envoyée à l’Aquanaute qui réalise l’action demandée de façon autonome.
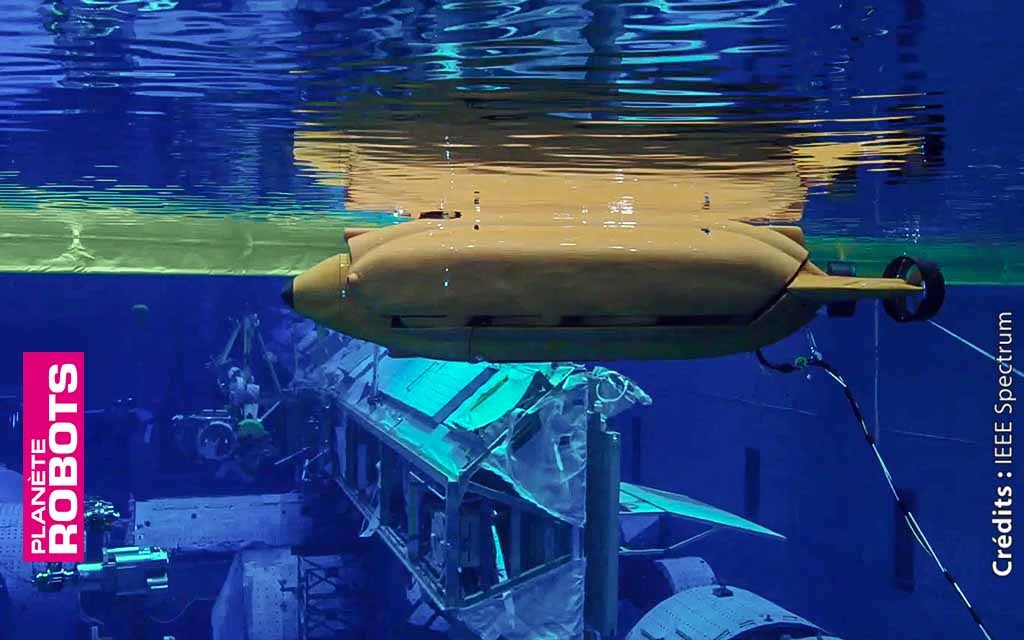
Le robot plongeur humanoïde est développé par la start-up américaine Houston Mechatronics créée en 2014 pour les exploitations gazières et pétrolières sous-marines. Tel un Transformer des mers, le robot, à sa mise à l’eau, ressemble à un simple sous-marin, mais c’est ensuite que la magie de la robotique opère, en escamotant sa tête munie de caméras et capteurs il déploie ses deux bras de manipulation.

source :