
La robotique douce est un domaine de recherche relativement nouveau, mais il est prometteur pour la robotique de pointe. Par exemple, des structures flexibles de robots pourraient offrir une interaction plus sûre avec les humains, une meilleure manipulation des objets et une plus grande maniabilité, entre autres avantages.
Des chercheurs en robotique du MIT ont mis au point une technique permettant de réduire les temps de calcul des mouvements de plusieurs minutes à quelques secondes seulement.
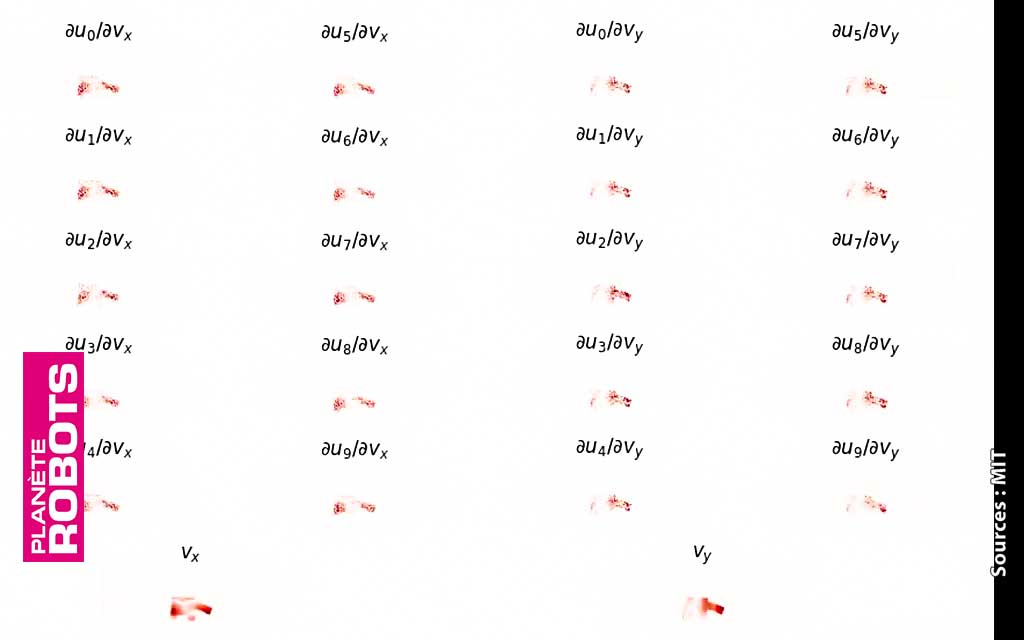
Le contrôle des robots dans les simulations repose sur un “observateur”, un programme qui calcule des variables qui voient comment le robot logiciel se déplace pour accomplir une tâche. Dans des travaux antérieurs, les chercheurs ont décomposé le robot souple en grappes de particules simulées conçues manuellement. Les particules contiennent des informations importantes qui aident à réduire les mouvements possibles du robot. Si un robot tente de se plier d’une certaine manière, par exemple, les actionneurs peuvent résister suffisamment à ce mouvement pour qu’il puisse être ignoré. Mais, pour des robots aussi complexes, le choix manuel des clusters à suivre pendant les simulations peut s’avérer délicat.
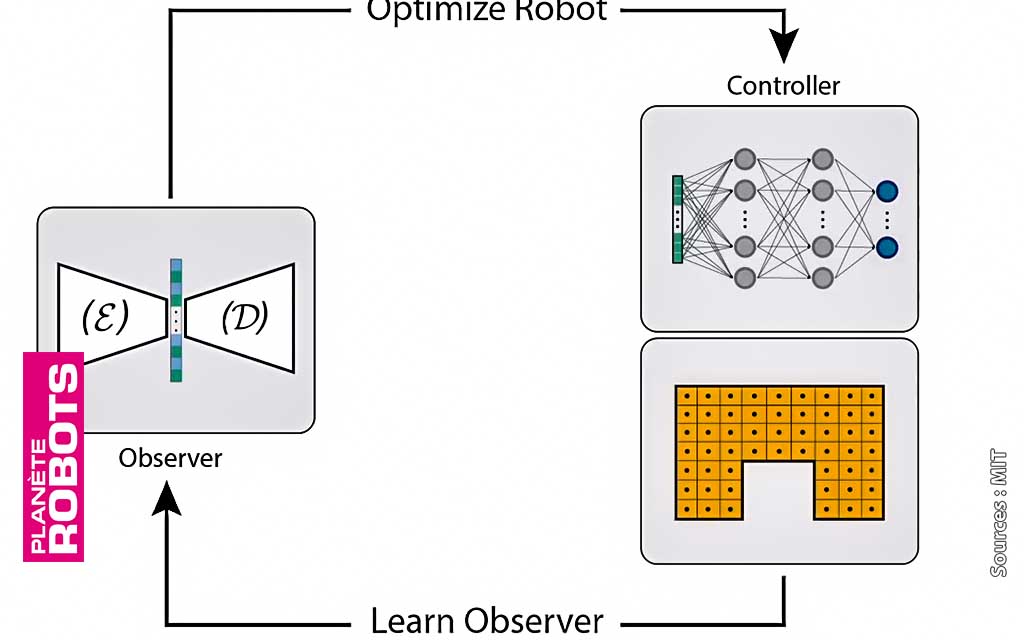
Simultanément, le contrôleur utilise cette information pour ajuster la rigidité optimale de chaque particule afin d’obtenir le mouvement désiré. À l’avenir, ces informations sur les matériaux peuvent être utiles pour l’impression 3D de robots logiciels, où chaque point de particules peut être imprimé avec une rigidité légèrement différente. “Cela permet de créer des modèles de robots adaptés aux mouvements du robot qui seront pertinents pour des tâches spécifiques “, explique M. Spielberg. “En apprenant ces paramètres ensemble, vous gardez tout aussi synchronisé que possible pour faciliter le processus de conception.”
Source de l’information :