
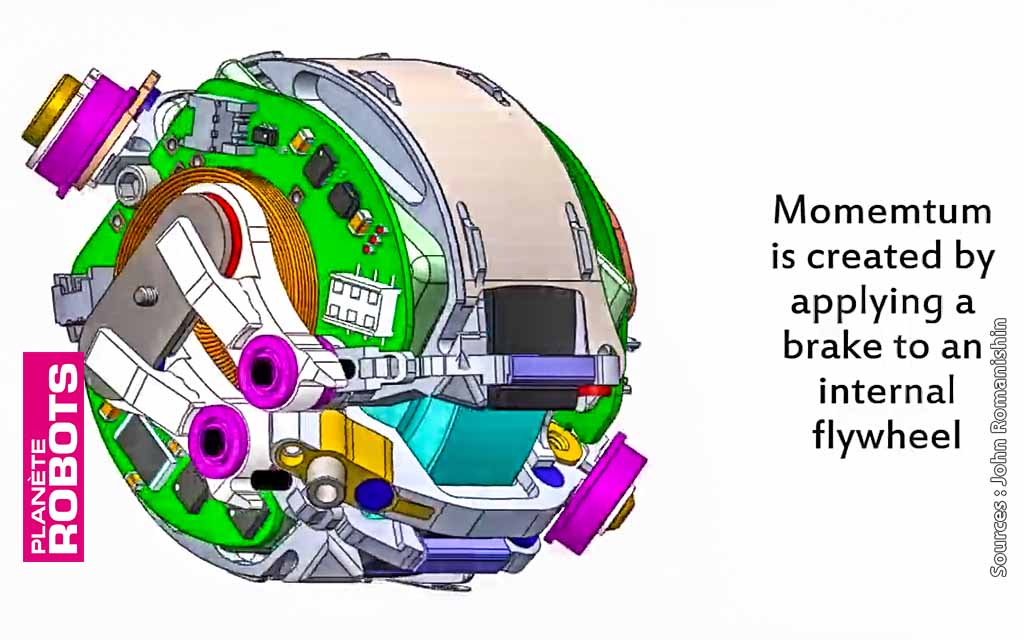
À l’intérieur de chaque “M-Block” modulaire, se trouve un volant d’inertie qui se déplace à 20.000 tours par minute, en utilisant le moment angulaire lorsque le volant est freiné. Sur chaque bord et chaque face, se trouvent des aimants permanents qui permettent à deux cubes de s’attacher l’un à l’autre.
Alors que le mécanisme est assez complexe à l’intérieur, l’extérieur est à l’opposé, ce qui permet des connexions plus robustes.
“Ce qui est unique dans l’approche, c’est qu’elle est peu coûteuse, robuste et potentiellement plus facile à mettre à l’échelle jusqu’à un million de modules “, explique John Romanishin, étudiant au doctorat de la CSAIL et auteur principal d’un nouvel article sur le système. “Les M-Blocs peuvent se déplacer d’une manière générale. D’autres systèmes robotiques ont des mécanismes de mouvement beaucoup plus compliqués qui nécessitent de nombreuses étapes, mais notre système est plus évolutif.”

En 2013, l’équipe a construit son mécanisme pour les M-Blocks. Ils ont créé des cubes à six faces qui se déplacent à l’aide de ce qu’on appelle des “forces inertielles”. Cela signifie qu’au lieu d’utiliser des bras mobiles qui aident à relier les structures, les blocs ont une masse à l’intérieur d’eux qu’ils “jettent” contre le côté du module, ce qui provoque la rotation et le mouvement du bloc.
Le projet a été soutenu, en partie, par la National Science Foundation et Amazon Robotics,
un organisme gouvernemental américain qui soutient la recherche fondamentale et l’éducation dans tous les domaines non-médicaux des sciences et du génie.
source :
http://news.mit.edu/2019/self-transforming-robot-blocks-jump-spin-flip-identify-each-other-1030
http://web.mit.edu/johnrom/www/design/

