
Cheetah est un robot quadrupède financé par la DARPA tout comme le robot Big Dog de Boston Dynamics. Depuis le tout premier modèle développé par le laboratoire de robotique biomimétique du MIT, Cheetah a bien évolué. Étonnamment, ce qui a été fait pour le faire évoluer a consisté à lui supprimer sa possibilité de voir par des caméras.
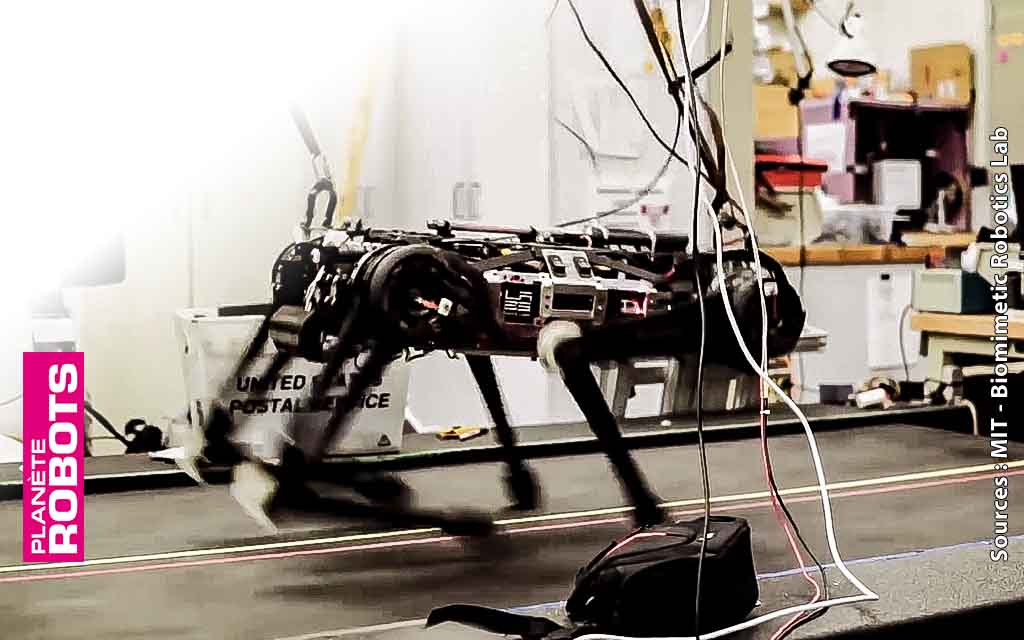
Le point de vue du concepteur original, le professor Sang-bae Kim, est que la vue classique sur un robot peut apporter des nuisances sonores, et ralentir les temps de réaction. Le robot Cheetah continue de percevoir son environnement, grâce à l’intelligente association de capteurs de pression au niveau de l’extrémité des pattes et d’un nouveau type d’algorithmes.
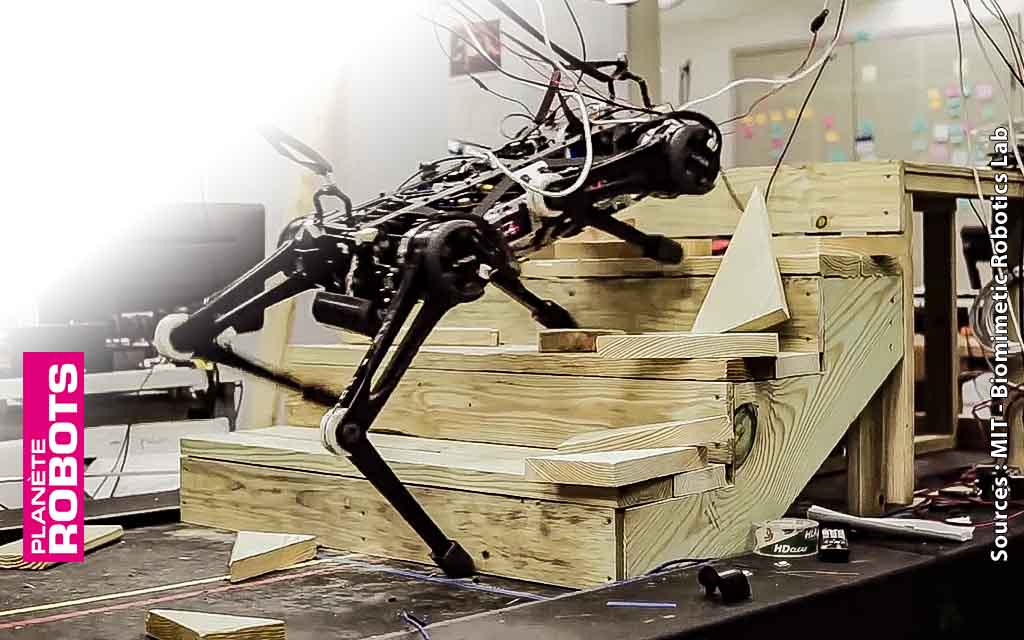
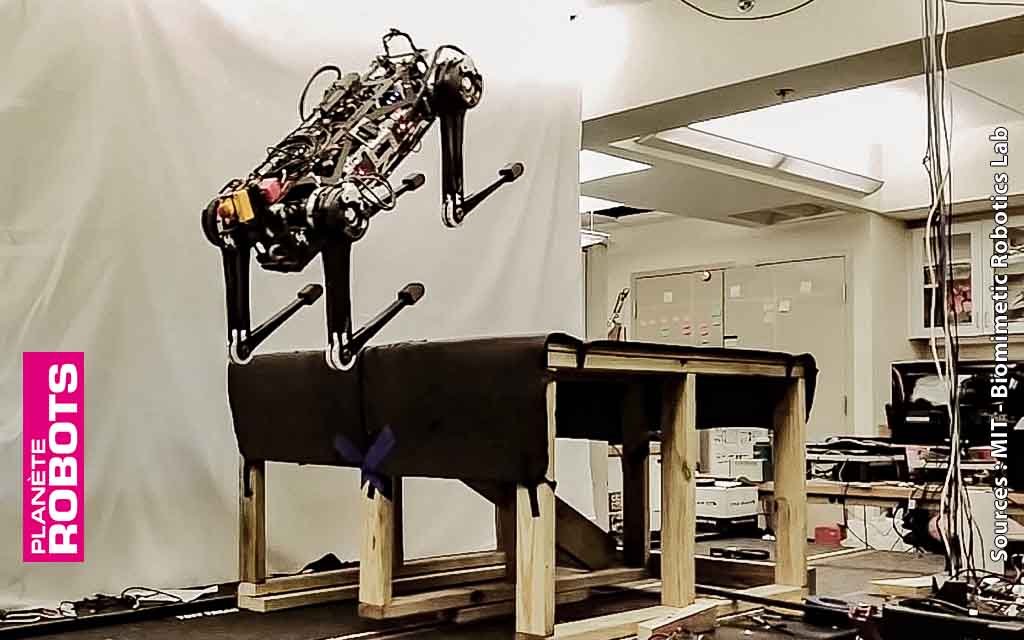
Et très efficacement, car désormais le quadrupède Dardevilesque est capable de sauter sur une table, de parcourir un escalier totalement encombré de débris en tous genres, ou de se déplacer sur trois pattes tel un animal blessé si une de ses pattes est abîmée !
La locomotion aveugle du robot dépend d’un algorithme de contrôle prédictif (L’algorithme est conçu pour effectuer ces calculs pour chaque segment toutes les 50 millisecondes, soit 20 fois par seconde), qui prédit la force qu’une de ses jambes doit appliquer une fois qu’elle s’est engagée dans une étape du mouvement.
“L’algorithme de détection des contacts vous dira : ” C’est le moment d’appliquer des forces au sol “, dit Kim. “Mais une fois au sol, il faut calculer les forces à appliquer pour déplacer le corps dans le bon sens.”
L’algorithme de contrôle prédictif du modèle calcule les positions multiplicatives du corps et des jambes du robot une demi-seconde dans le futur, si une certaine force est appliquée par une jambe donnée lorsqu’elle entre en contact avec le sol.
“Disons que quelqu’un donne un coup de pied au robot de côté”, dit Kim. “Lorsque le pied est déjà au sol, l’algorithme décide : ” Comment dois-je spécifier les forces sur le pied ? Parce que j’ai une vitesse indésirable à gauche, donc je veux appliquer une force dans la direction opposée pour tuer cette vitesse. Si j’applique 100 newtons dans cette direction opposée, que se passera-t-il une demi-seconde plus tard ?”

