En s’inspirant d’un principe que tout le monde peut observer, dans le principe de construction reproduit partout dans le monde par les castors, les fourmis ou les termites, Nils Napp chercheur à l’université de Buffalo de l’État de New York, travaille depuis plusieurs années à appliquer les principes directeurs biologiques de la construction non hiératique à la construction robotique.
Il travaille plus particulièrement sur des algorithmes de construction inspirés des termites qui s’adaptent aux terrains non structurés et chaotiques, en exploitant une combinaison de comportements réactifs et de matériaux de construction conformes.
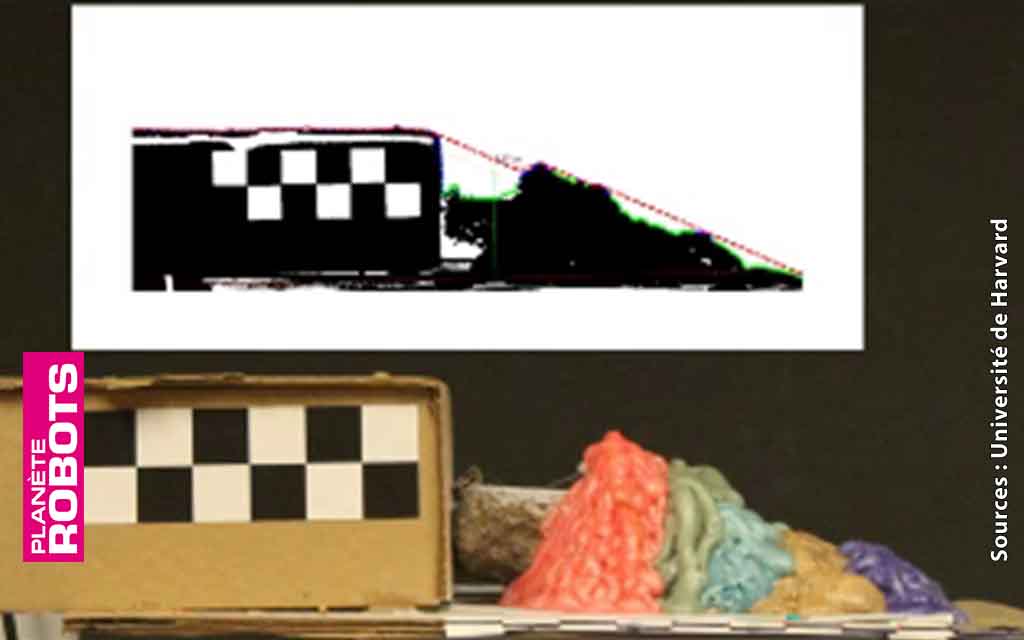
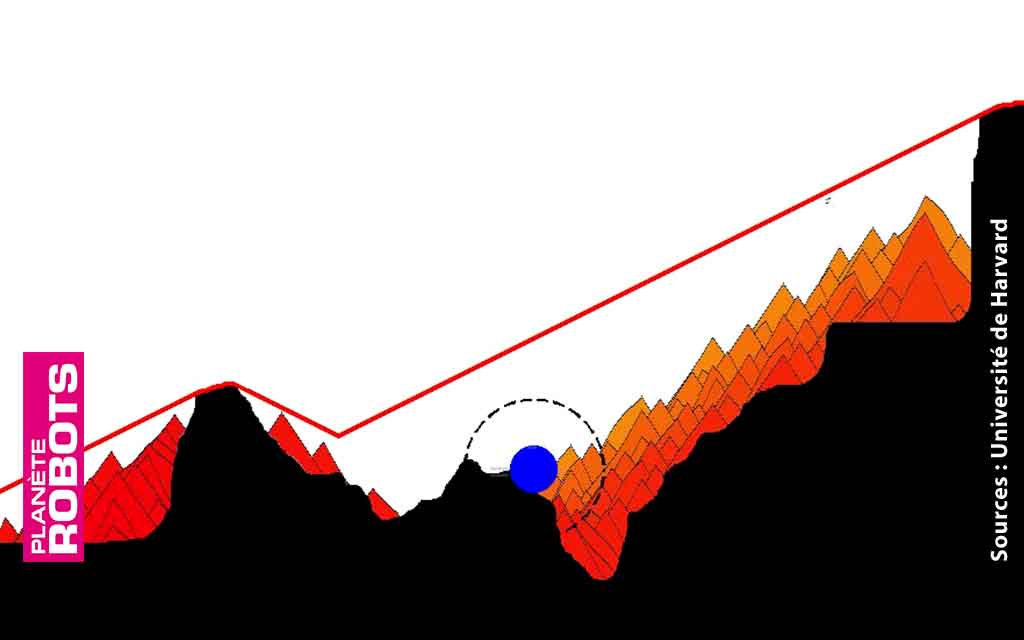
Le chercheur a tout d’abord travaillé sur une machine de laboratoire, très similaire à une imprimante 3D, capable d’analyser un relief et d’y construire une rampe d’accès en déposant précisément de la mousse polyuréthane à des endroits très précis pour adoucir le relief.

Maintenant le voilà travaillant avec des robots qui comme des castors, ramassent des objets qu’ils trouvent dans les alentours pour ensuite les empiler selon des objectifs précis mais sans plan, simplement par une suite d’assemblages.
Le développement de tels robots castors une fois abouti, permettrait sur des scènes de catastrophe naturelle ou de guerre, de construire des rampes d’accès pour faciliter le déplacement d’autres véhicules. L’utilisation de telles machines pourrait aussi participer à la colonisation de planètes en facilitant le déploiement d’infrastructures sur des terrains hostiles et non structurés.
Vidéo d’origine :
Article source :
https://www.clubic.com/robotique/actualite-844386-robot-castor-designe-construire-rampes-terrains-accident.html
https://fr.wikipedia.org/wiki/Stigmergie
Page du chercheur Nils Napp
https://cse.buffalo.edu/~nnapp/index.html