Pour un coût de 3 000 dollars, Doggo le robot quadrupède est un robot open source, conçu par des étudiants de Stanford en mobilité. Ses quatre pattes sont animées par un système de courroies, qui lui permette de marcher, courir ou de faire des sauts retournés.
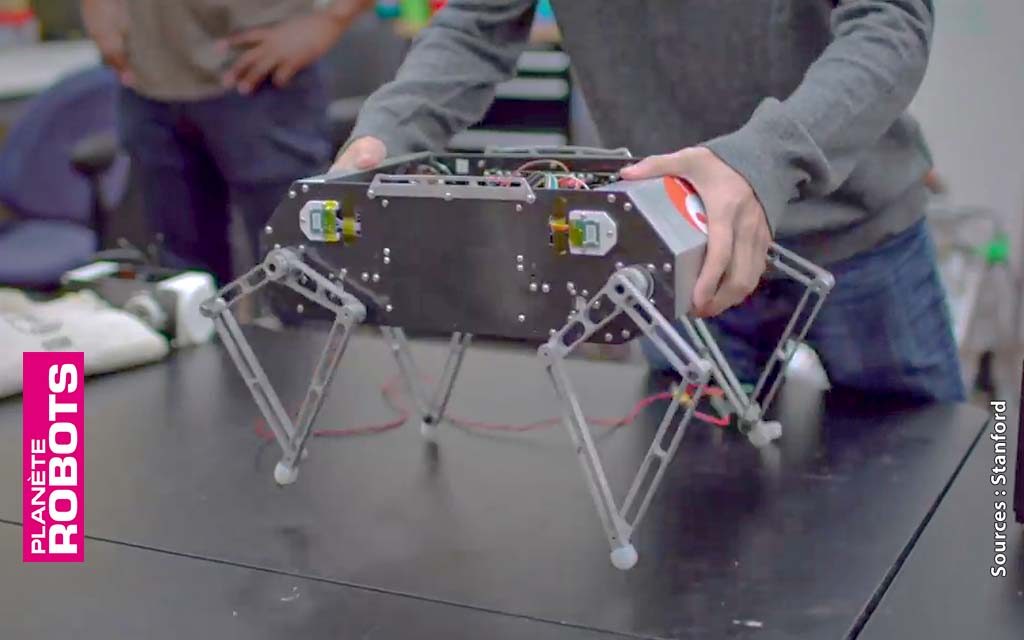
Actuellement pour le faire se déplacer, deux étudiants sont nécessaires pour sa mise en œuvre, un premier équipé d’un bouton marche/arrêt, un second équipé d’un ordinateur qui , pour le moment, commande à distance, la vitesse, l’intensité des sauts du robot.

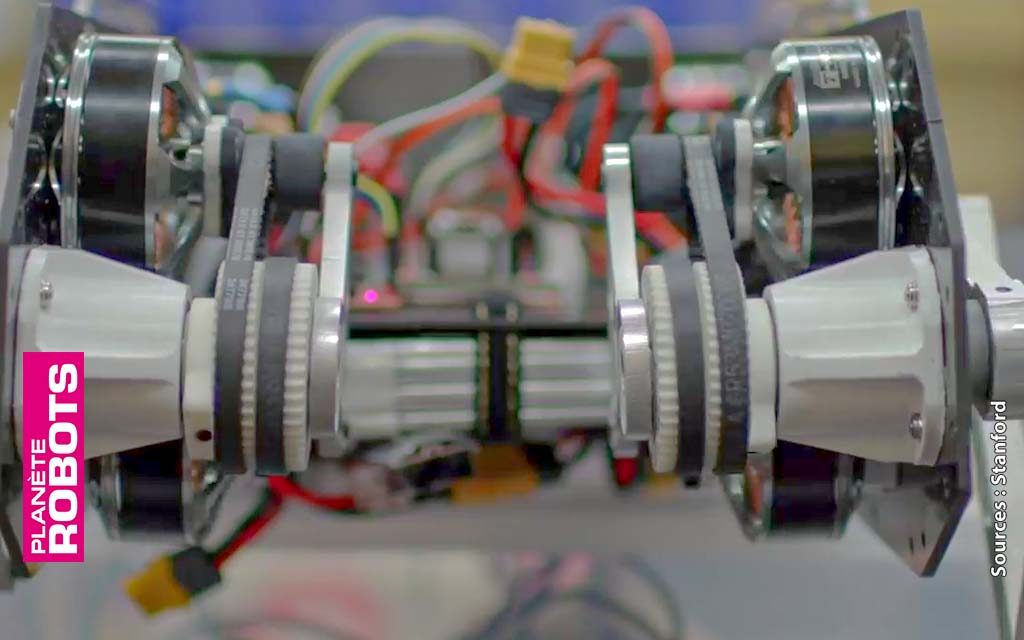
Doggo a été conçu dans le but d’être rapide et léger, la structure rigide de son corps est conçue en panneaux de carbone, et ses pattes en alliage agissent comme un système de suspension, chaque patte est un assemblage de quatre éléments articulés qui forment un triangle sur la pointe duquel s’appuie le robot. 8 000 fois par seconde les moteurs recalculent la force avec laquelle ils entraînent les courroies, pour toujours contrôler la trajectoire.
Les étudiants attirent l’attention sur le fait, que le déplacement du robot a toujours été essayé dans des conditions réelles et jamais simulées, et reconnaissent qu’au tout début de ses déplacements ne savaient pas précisément comment il se déplacerait, et son content d’avoir créé un modèle de robot que d’autres étudiants pourraient facilement reproduire et améliorer en partageant leur expérience.