
Covid-19 et besoins en robotique
La pandémie de Covid-19 a fait monter en flèche l’utilisation du commerce électronique. Pour répondre à une demande toujours plus grande, les grands groupes se sont équipés de robots dans leurs entrepôts. Ces deux effets ont considérablement augmenté la demande de robots dans les entrepôts et les centres de distribution. Cela a créé toujours plus de travail de proximité entre les humains et les robots. La vitesse des déplacements compte énormément. Par conséquent, il peut être dangereux pour les magasiniers de remplir des commandes à proximité.
Actuellement, pour des tâches similaires, les robots sont beaucoup plus lents que les travailleurs humains. Pour que l’efficacité humaine soit au même niveau chez un robot, il faut faire des progrès en matière de planification des mouvements et de matériel robotique. Les progrès récents en matière de détection et de moteurs comblent le fossé, mais la planification des mouvements reste un goulot d’étranglement.
Gomp et le Deep learning
Les chercheurs de l’Université de Berkeley ont développé un outil de planification des mouvements. Il optimise de façon spectaculaire les mouvements en résolvant une séquence de problèmes quadratiques.
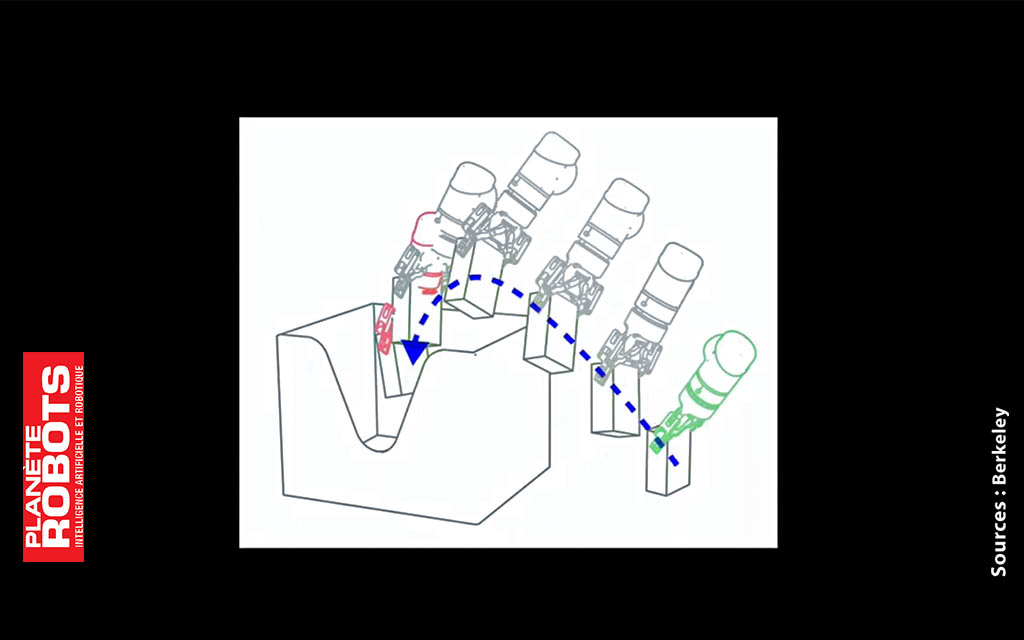
Gomp (Grasp-Optimized Motion Planning) optimise simultanément l’angle de préhension pour découvrir des trajectoires toujours plus rapides. Cependant, il peut arriver que les mouvements à grande vitesse qui en résultent soient difficiles à exécuter pour le robot. Il en résulte un dépassement dans la course des mouvements et une usure des articulations du robot. Pour résoudre ce problème, ils ont pu calculer des mouvements parasites des vibrations minimum.
Ils ont tout d’abord constaté que cela nécessitait tellement de calculs supplémentaires, la réponse n’était pas pratique. Ils ont alors exploré les récentes avancées en matière de Deep learning. En simulation, ils ont calculé des milliers de mouvements fluides et les ont utilisés comme exemples pour former un réseau neuronal profond à deux niveaux.
Le premier stade propose des trajectoires de longueur variable et le second stade sélectionne la trajectoire optimale. Ensuite, ils optimisent la trajectoire, il en résulte une trajectoire finale lisse. Pour évaluer les résultats, ils ont comparé ceux du planificateur de mouvement original avec celui du planificateur de mouvement utilisant le Deep learning.
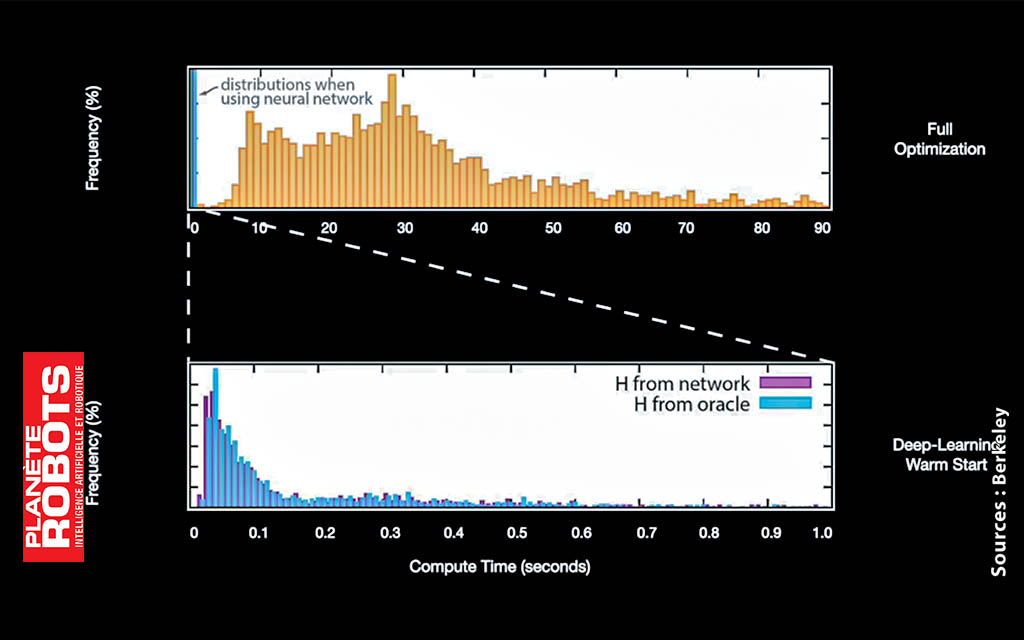
80 millisecondes au lieu de 29 secondes
Les résultats sont stupéfiants ! Sur un millier de trajectoires aléatoires, le planificateur original nécessitait 29 secondes par trajectoire. Maintenant, le planificateur en mode Deep learning ne nécessite que 80 millisecondes, soit 300 fois plus rapide !
Cette combinaison unique de planification de mouvements rapides et fluides comble une lacune importante pour permettre aux robots d’être pratiques pour l’emballage industriel et la manutention des paquets par exemple.
WeAreCOBOTS : Universal Robots annonce la plus grande exposition virtuelle de Cobots

