
Freud et l’intelligence artificielle
Inspiré d’une hypothèse de Freud en 1950, la théorie de Hebbs, pourrait bien permettre une plus grande adaptation des robots. Ce type de réseau d’intelligence artificielle est à un tel point, qu’il serait possible à un robot quadrupède d’imaginer et de développer rapidement une nouvelle technique de marche aussi efficace après avoir perdu une de ses jambes. C’est tout du moins ce qui a été mis en évidence par des simulations de calculs.
Comment ça marche ?
Cette règle suggère que lorsque deux neurones s’excitent conjointement, il se crée ou renforce un lien les unissant. Cette théorie tente d’expliquer l’apprentissage associatif, dans lequel une association se fait par la répétition de deux stimuli. En conséquence, la répétition d’un stimulus seul entraîne le rappel de l’autre stimulus ensuite.
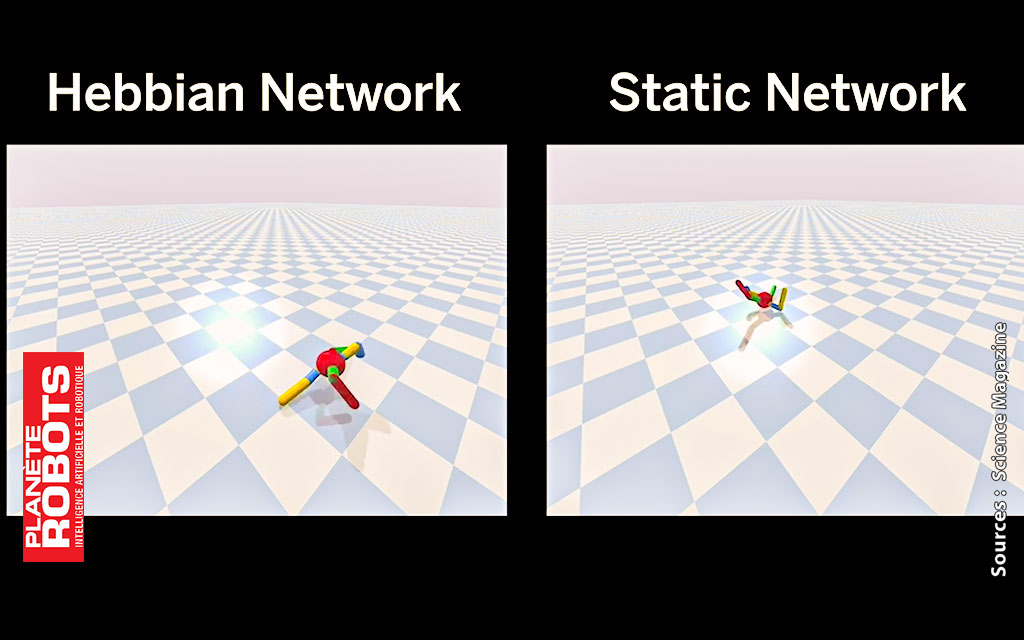
De nouveaux réseaux d’intelligence artificielle utilisant cette théorie ont eu des résultats spectaculaires. Des chercheurs ont créé des réseaux avec des “règles hébbiennes” – des formules mathématiques qui permettent aux cerveaux d’IA de continuer à apprendre. Là où les valeurs dictent comment l’activité se propage d’un neurone à l’autre, ils changent en fonction de leurs expériences. L’expérience effectue une simulation sur deux robots utilisant deux méthodes de calcul. Le premier utilise le réseau Hebbien.
Après avoir partiellement retiré la même jambe aux deux robots, les chercheurs les ont obligés à essayer de compenser la blessure. Effectivement, les deux robots ont d’abord lutté, mais le “robot Hebbien” a pu marcher près de sept fois plus loin.
Citée en 1950, l’étude qui associe Freud et l’intelligence artificielle.