
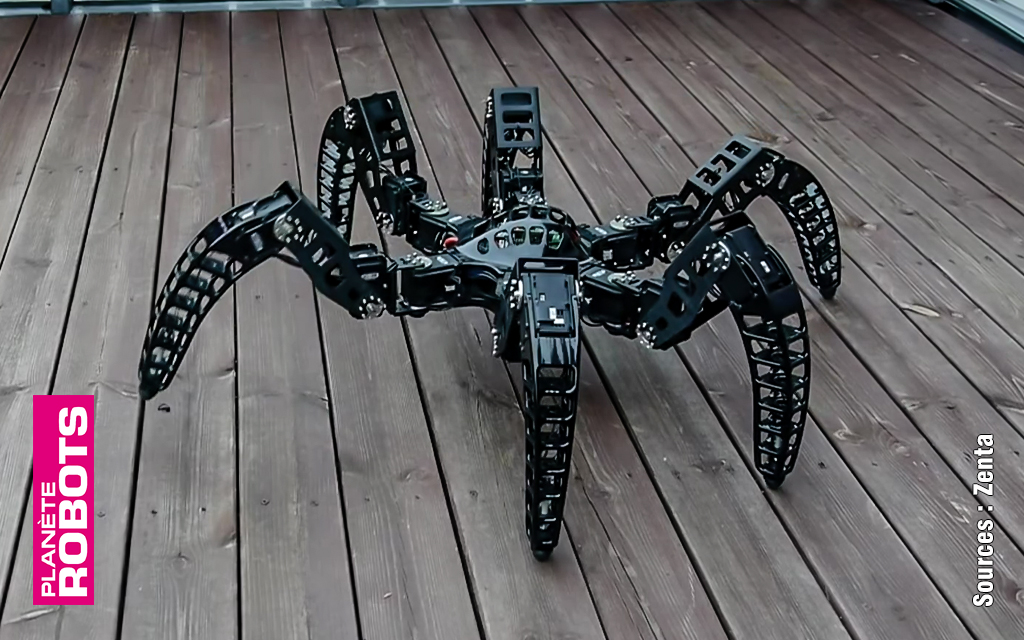
À Planète Robots on aime bien les hexapodes, les robots avec 6 pattes qui se déplacent sur tout un tas de surfaces différentes. Et celui d’aujourd’hui démontre des aptitudes intéressantes pour le tout-terrain. Kåre Halvorsen a travaillé d’arrache-pied depuis novembre dernier pour aboutir tout récemment au résultat que vous pouvez admirer dans la vidéo ci-dessous, et est ainsi devenu la grande célébrité dans la communauté Geek de Norvège.
À la base le développeur s’est inspiré de la tarentule. Chaque élément articulé de son MX-Phoenix qui pèse en ordre de marche 5 kg, a été modélisé par ses soins et imprimé en 3D, son robot au niveau des commandes a été conçu pour que ses 18 moteurs ( 3 par patte) puissent être commandés à distance. Kåre Halvorsen a conçu sa machine dans le but de s’en servir pour faire de l’exploration sur des lieux difficilement accessibles de façon naturelle ou sur les lieux d’une catastrophe, mais ne serait pas contre le fait de l’utiliser comme base animatronique d’une créature pour un film fantastique.
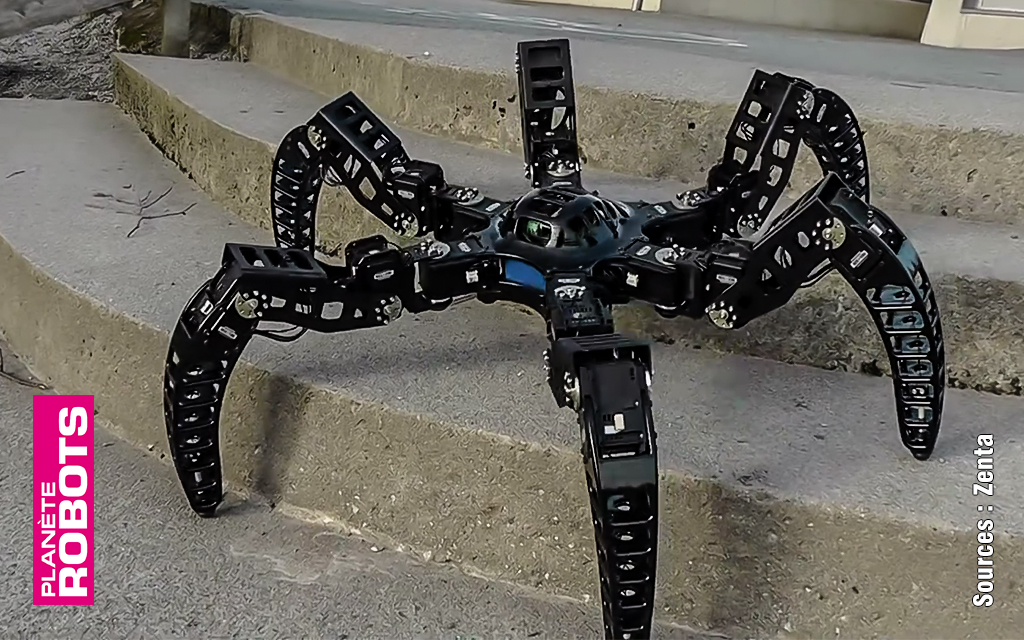
Au cas où une des pattes tomberait en panne, le mode de déplacement de l’hexapode a été conçu pour s’en accoutumer et continuer son déplacement. le robot au dire de son auteur serait aussi à l’aise sur terrain plat que pour monter des escaliers.
Kåre Halvorsen qui évolue dans les forums sous le pseudo Zenta n’en est pas à sa première réalisation de robot inspiré du modèle vivant avec MX-Phoenix, comme le prouve son profil sur le site http://www.trossenrobotics.com/ :
http://forums.trossenrobotics.com/member.php?1535-Zenta&s=b378d01e8ff53b23cd0f4b497f64d586
Articles similaires :
Pleurobot, un robot salamandre permet d’étudier l’évolution de la marche