
Il y a 3 ans Crabster CR 200 de la société KRISO (Korean Research Institute of Ships and Ocean Engineering) faisait ses premiers pas en Corée du Sud.
Et aujourd’hui, maintenant que nous sommes à la version CR 600 du Crabster, de nouveaux tests ont été faits en bassin, avec une démonstration impressionnante en septembre dernier de ses capacités de déplacement sur sol sous-marin :
Maintenant vous allez me dire,
“O.K., c’est super, c’est un robot sous-marin qui se déplace sur le fond marin avec ses 3 paires de pattes”
Mais l’innovation de ce rover sous-marin est qu’il fonctionne aussi comme un sous-marin et qu’il peut se déplacer entre deux eaux en utilisant ses pattes (bardées de capteurs, moteurs et d’électronique) comme des nageoires, ainsi il se passe des hélices (bruyantes dans le cas d’un déplacement furtif, et beaucoup moins néfastes pour les fonds marins).
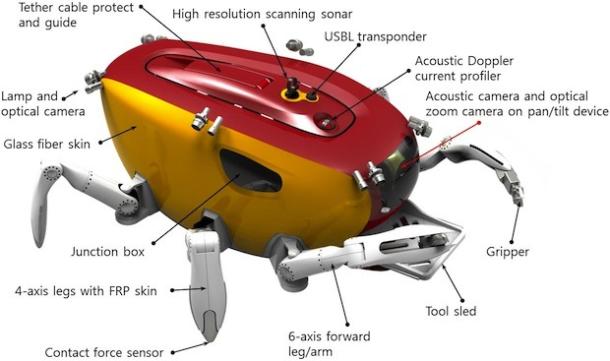
À la base, l’idée est venue du questionnement sur les possibilités d’un sous-marin à se déplacer sous l’eau face à des courants sous-marins forts, la solution a été trouvée d’équiper un véhicule sous-marin d’un mode de locomotion hexapode pour marcher face au courant, en s’inspirant une nouvelle fois (comme nous vous expliquons souvent dans nos articles) du vivant. Sa conception a été complétée d’une étude hydrodynamique de sa coque pour offrir le moins de résistance possible aux courants.
L’appareil pèse 600 kg et son déploiement est assisté par au minimum 4 personnes installées dans des conteneurs d’équipement facilement transportables sur un bateau de recherche. Un pilote pour le déplacement, un copilote qui commande les caméras, les éclairages et les bras robotisés, ainsi qu’un ingénieur sonar, tous présents en surface permettent sa mobilité.

