
Si tous les systèmes de géolocalisation tombaient en panne, quelles seraient les solutions à apporter pour l’orientation lors du déplacement au sol ? La fourmi du désert étudiée par des doctorants en robotique de l’Institut des sciences du mouvement – Étienne-Jules Marey à Marseille, est là pour donner des réponses. Avec une étude accompagnée par des spécialistes, les ingénieurs ont créé un robot à 6 pattes, sur le corps duquel se trouve plusieurs caméras, dont deux sont orientées vers le haut.
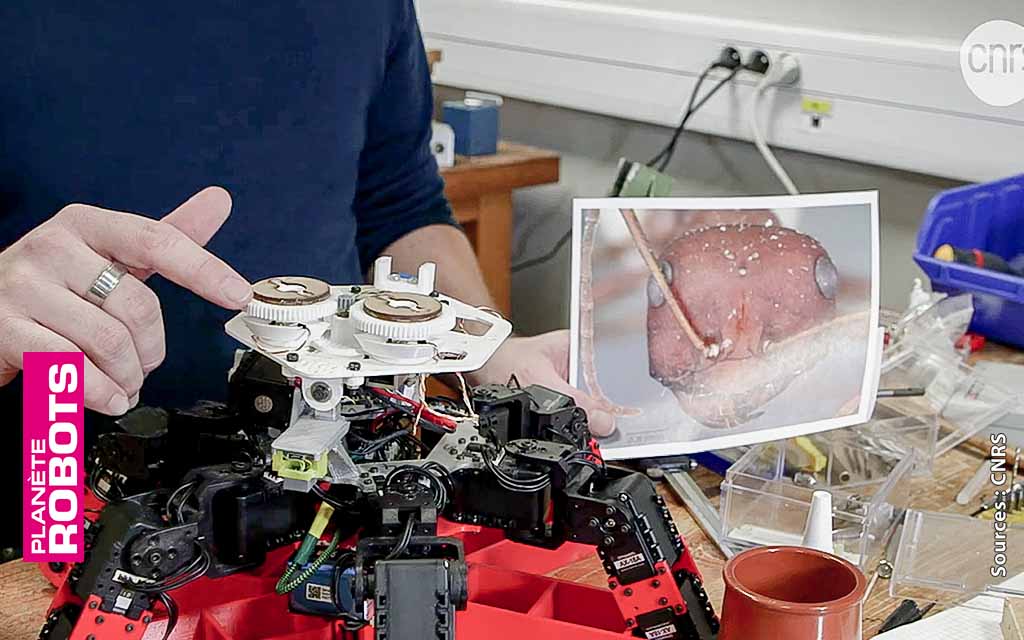
Elles sont couplées à de l’électronique embarquée qui analyse la polarisation de la lumière en fonction des déplacements. Grâce à ces analyses, de simples calculs permettent de cartographier les déplacements. L’énorme avantage de ces recherches c’est qu’elles réduisent la consommation d’énergie due au GPS. Cette nouvelle orientation du développement des robots pourrait bien intéresser les créateurs de robots.
lien vers la vidéo :
Pleurobot, un robot salamandre permet d’étudier l’évolution de la marche

